您当前的位置:首页>论文资料>无线驱鸟炮系统设计与实现
内容简介
 数事费本与变用
数事费本与变用无线驱鸟炮系统设计与实现
王琦周立青
(武汉大学电子信息学院湖北武汉430072)
设计开发
摘要针对机场身害日总严重以及传统驱鸟手投效果不佳的现状,设计了一种无线驱岛总系统。系统上位机由PC机和数传电台组成用来向下位机发出指令和读取下住机反馈的信息。下位机以单片机AT89S52为核心,用来控制煤气炮的点火同时配合压力变送器、振动传感器等传感装置检测下位机的状态,并将这些状态信息反馈回上位机。该系统灵活地实现了运程单炮点火、一组或全部炮按设计时序放炮以及现场点等多种不规律点炮驱身方式,达到了较好的驱岛效果
关键词:驱岛单片机分布式网络无线数据传输
中图分类号:TN206
文献标识码:A
文章编号:1007-9416(2013)09-0127-02
随着航运事业的发展,飞机数量、航线增多,同时随着人类活动范围的扩大,使适合乌类生活、栖息、繁衍的自然环境大幅度减少,机场成为鸟类生活、栖息、繁衍的理想场所。随之面来的就是飞鸟撞机的几率大大增加。目前各飞机场采取的都是比较传统的驱鸟方法,如猎枪捕杀、捕鸟网,驱鸟专用车等手段,效果却往往不尽人意,本文设计了一种基于无线网络控制的驱乌炮系统,实现了对传统驱乌方法的改进。
1系统总体方案设计
系统由上位机发出指令,通过数传电台传输到下位机,再由下位机控制驱鸟炮的开关与点火,同时下位机能够向上位机反馈结果。根据这些设计要求,采用集总式分布式网络,设计系统的网络拓扑结构如(图1)所示。
1.1上位机的设计
在(图1)中,上位机通过无线网络实现对每个下位机系统的检测和控制,完成以下几个功能,
(1)完成对每个下位机系统在机场地图上的地理分布显示。(2)检测下位机是否在线。
(3)通过手动或自动方式,控制下位机打炮驱鸟。手动方式是由工作人员输入命令控制点火,自动方式则通过预先设置参数,单独控制某一个驱鸟炮,某一组或者全部的驱鸟炮按照设定的时间顺序进行放炮驱乌
染中心
下位机:
TR机点线登计
位积金 s热
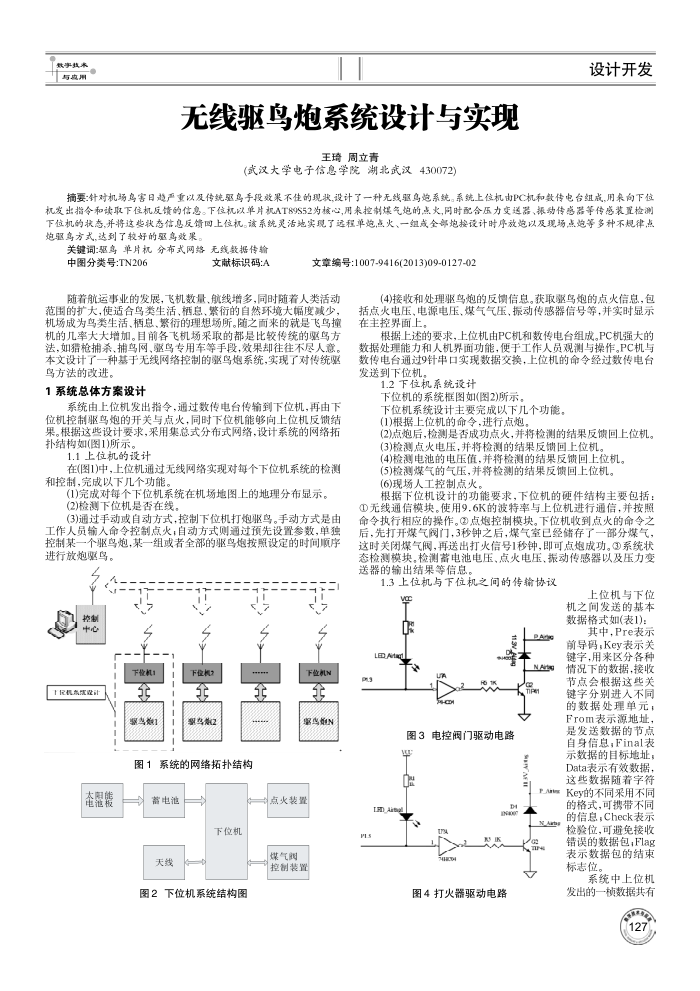
图1系统的网络拓扑结构
奎翘
蓄电池
下位机
天线
图2下位机系统结构图
下位金黑N
点火装置煤气阀控制装置
(4)接收和处理驱鸟炮的反馈信息。获取驱鸟炮的点火信息,包括点火电压、电源电压、煤气气压、振动传感器信号等,并实时显示在主控界面上
根据上述的要求,上位机由PC机和数传电台组成。PC机强大的数据处理能力和人机界面功能,便于工作人员观测与操作。PC机与数传电台通过9针串口实现数据交换,上位机的命令经过数传电台发送到下位机
1.2下位机系统设计
下位机的系统框图如(图2)所示。
下位机系统设计主要完成以下几个功能。(1)根据上位机的命令,进行点炮。
(2)点炮后,检测是否成功点火,并将检测的结果反馈回上位机。(3)检测点火电压,并将检测的结果反馈回上位机。
(4)检测电池的电压值,并将检测的结果反馈回上位机。(5)检测煤气的气压,并将检测的结果反馈回上位机。(6)现场人工控制点火,
根据下位机设计的功能要求,下位机的硬件结构主要包括 ①无线通信模块。使用9.6K的波特率与上位机进行通信,并按照命令执行相应的操作。点炮控制模块。下位机收到点火的命令之后,先打开煤气阀门,3秒钟之后,煤气室已经储存了一部分煤气,这时关闭煤气阀,再送出打火信号1秒钟,即可点炮成功。系统状态检测模块。检测蓄电池电压、点火电压、振动传感器以及压力变送器的输出结果等信息,
1.3上位机与下位机之间的传输协议
上位机与下位机之间发送的基本数据格式如(表1):
BAC
BAt
Ata P
图3电控阀门驱动电路
S
P Ait
LRD_Ait
x_Aat
P1s
图4打火器驱动电路
其中.Pre表示前导码,Key表示关键字,用来区分各种情况下的数据,接收节点会根据这些关键字分别进入不同的数据处理单元; From表示源地址,是发送数据的节点自身信息,Final表示数据的目标地址: Data表示有效数据,这些数据随着字符 Key的不同采用不同的格式,可携带不同的信息,Check表示检验位,可避免接收错误的数据包,Flag 表示数据包的结束标志位。
系统中上位机发出的一顿数据共有