煤炭车辆自动计重定位系统的图像边缘检测设计与实现
内容简介
 应用研究
应用研究煤炭车辆自动计重定位
系统的图像边缘检测设计与实现
俞新芳
(福建煤电股份有限公司福建龙岩364000)
热事热来与成用
摘要:在煤炭计重信息化、数字化过程中,煤炭车辆处在不同的地磅位置,对自动计量结果的准确性有重要影响。针对煤炭企业的需要,本文阐述了灰度直方图均街法进行过磅车辆图像预处理的方法,应用虚权检测线设置方法,通过过磅压线检测图像识别技术自动判别煤炭车辆是否处于计量的合理位置;在图像识别上,考虑到煤炭率辆计重环境常常处在多粉尘等不利因素,造成图像识别过程中图像模糊,因此,采用差分法提取车辆边缘轮廊;在压线判定原理上,采用了一种基于数学平面几何的判定规则,无需进行大量的运算;最后,建立了相应的煤炭车辆计重自动定位模型并造行了初步应用。
关键词:虚拟检测线检测图像识别流动妈双线Canny算予车辆定位中图分类号:TP391.41
文献标识码:A
1、引言
文章编号:1007-9416(2012)01-0078-03
法能够有效去除因为光照强弱等原因造成的摄像不清,对比度不
随着国家数字矿山的不断发展,目前多数煤炭企业都实现煤炭
计重信息化、数字化。众所周知,在计重过程中,煤炭车辆能否处于合理范围计重,对自动计重结果的准确性有重要影响。但是目前煤炭计重过程中,依然普遍存在着依靠人工肉眼主观判断和识别煤炭车辆是否停放在合理的计重范围,这不仅影响到煤炭计重数据的准确性,更重要的是存在着计重作弊的漏洞,影响到计重监管的可靠性。因此,煤炭车辆计重自动定位是目前煤矿企业数字化建设中需要解决的关键技术之一
目前,煤矿企业解决车辆计重自动定位间题主要是利用红外对射器进行车辆自动定位识别。这种方法的优点是技术原理简单,易于实现和掌握;但是硬件设备投资大、占用空间多,施工比较复杂。本文提出应用虚拟检测线设置方法,通过过磅压线检测图像识别技术自动判别煤炭车辆是否处于计重的合理位置,建立了相应的煤炭车辆计重自动定位模型。其基本原理是:流动蚂蚁线算法设置车辆虚拟检测线,采用Canny算子对车辆进行图像识别,采用差分法提取车辆边缘轮席;在此基础上,通过灰度直方图拉伸和滤波对车轮边缘定位:最后,采用了一种基于数学平面几何的判定规则,自动判
断车辆是否处在车辆虚拟检测线的合理范围内。 2、过梯车辆像预处理
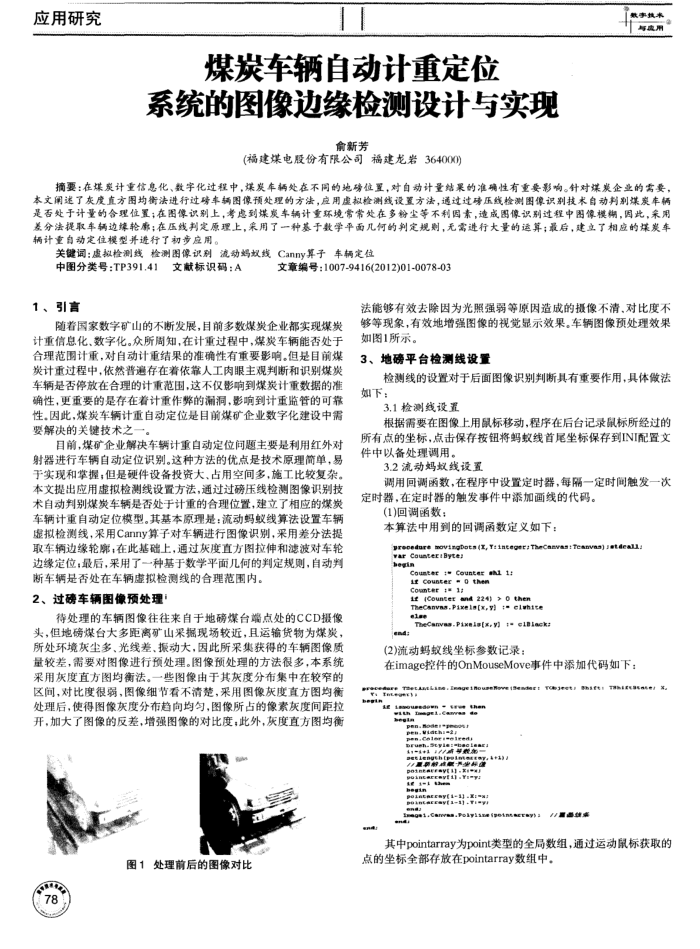
待处理的车辆图像往往来自于地磅煤台端点处的CCD摄像头,但地磅煤台大多距离矿山采掘现场较近,且运输货物为煤炭,所处环境灰尘多、光线差、振动大,因此所采集获得的车辆图像质量较差,需要对图像进行预处理。图像预处理的方法很多,本系统采用灰度直方图均衡法。一些图像由于其灰度分布集中在较窄的区间,对比度很弱,图像细节看不清楚,采用图像灰度直方图均衡处理后,使得图像灰度分布趋向均匀,图像所占的像素灰度间距拉开,加大了图像的反差,增强图像的对比度;此外,灰度直方图均律
图1处理前后的图像对比
78
够等现象,有效地增强图像的视觉显示效果。车辆图像预处理效果如图1所示。
3、地磅平台检测线设置
检测线的设置对于后面图像识别判断具有重要作用,具体做法如下:
3.1检测线设置
根据需要在图像上用鼠标移动,程序在后台记录鼠标所经过的所有点的坐标,点击保存按钮将蚂蚊线首尾坐标保存到INI配置文件中以备处理调用。
3.2流动妈奴线设置
调用回调函数,在程序中设置定时器,每隔一定时间触发一次定时器,在定时器的触发事件中添加画线的代码。
(1)回调函数:
本算法中用到的回调函数定义如下:
preceduremovingbots (Z,Ytinteger/TheCanvas:Teamvas)etdeall
var CounteriBytes hegin
Countet Counter shl 1: it Counterthen
Coumter = 1: ir Countet
nd224)>0the
TheCanm
vas.Pixels[x,y]:-cluhite
lse
end
.Pixeis[x,y]- clBiack?
(2)流动蚂蚊线坐标参数记录
在image控件的OnMouseMove事件中添加代码如下:
F
setn
道
eipeintactay)
EaO
其中pointarray为point类型的全局数组,通过运动鼠标获取的点的坐标全部存放在pointarray数组中。