您当前的位置:首页>论文资料>基于OpenGL的机械臂运动建模与仿真
基于OpenGL的机械臂运动建模与仿真
内容简介
 学术论坛
学术论坛基于OpenGL的机械臂运动建模与仿真
宋薇1.2陈小艳?
(1.武汉理工大学计算机科学与技术学院湖北武汉430n63;2.湖北广据电视大学湖北武汉430074)
数事执术每质用
摘要:基于多附体运动学原理,分析三杆机械臂的D-H坐标系和雅可比矩降,并采用openGI与VC++平台建立了机械肾的三维仿真模型,从而实现了对机械肾整体适动过程的模拟,并且有效检验了机械肾臂运动学模型的相关性能
关键词:机械肾 D-H坐标系OpenGl 中图分类号:TP391.41文献标识码:A
文章编号:1007-9416(2011)10-0162-01
机械臂三维运动仿真是机器人仿真研究中一个很重要的组成部分。机械臂仿真可以用MATLAB、ADAMS等这些平台进行运动仿真:但由于这些方法都只能基于特定工具箱和已有函数,通过定时器不断制新视图,无法灵活扩展功能,因此,本文提出基于MFC 框架类和OpenGL雨数库,OpenGL和VC++6.0开发平台上实现三自由度机械臂运动建模与仿真。
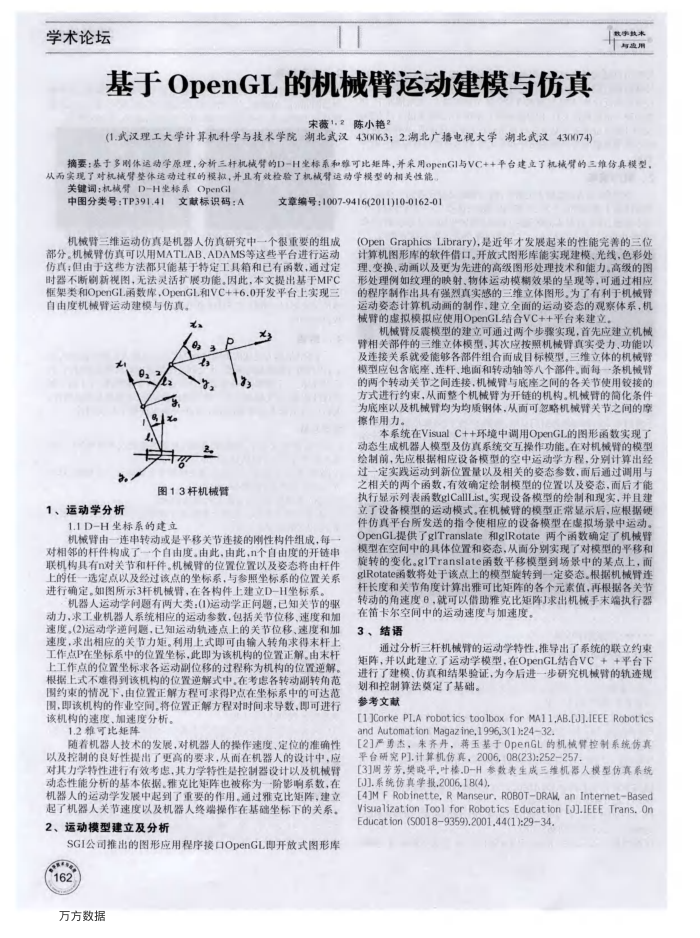
图13杆机械胃
1、运动学分析
1.1D-H坐标系的建立
机械臂由一连串转动或是平移关节连接的刚性构件组成,每对相邻的杆件构成了二个自由度,由此,由此,n个自由度的开链审联机构具有n对关节和杆件。机械臂的位置位置以及姿态将由杆件上的任一选定点以及经过该点的坐标系,与参照坐标系的位置关系进行确定,如图所示3杆机械臂,在各构件上建立D-
-H坐标系
机器人运动学间题有两大类:(1)运动学正问题,
已知关节的驱
动力,求工业机器人系统相应的运动参数,包括关节位移,速度和加速度,(2运动学逆问题,已知运动轨速点上的关节位移、速度和加速度,求出相应的关节力矩。利用上式即可由输人转角求得末杆上工作点P在坐标系中的位置坐标,此即为该机构的位置正解。由末杆上工作点的位置坐标求各运动副位移的过程称为机构的位置逆解。根据上式不难得到该机构的位置逆解式中,在考虑各转动副转角范围约束的情况下,由位置正解方程可求得P点在坐标系中的可达范图,即该机构的作业空间,将位置正解方程对时间求导数,即可进行该机构的速度、加速度分析。
1.2雅可比矩阵
随着机器人技术的发展,对机器人的操作速度,定位的准确性以及控制的良好性提出了更高的要求,从而在机器人的设计中,应对其力学特性进行有效考虑,其力学特性是控制器设计以及机械臂动态性能分析的基本依据.雅克比矩阵也被称为一阶影响系数,在机器人的运动学发展中起到了重要的作用。通过雅克比矩阵,建立起了机器人关节速度以及机器人终端操作在基础尘标下的关系。 2、运动模型建立及分析
SGI公司推出的图形应用程序接口OpenGL即开放式图形库 6
万方数据
(OpenGraphicsLibrary),是近年才发展起来的性能完善的三位计算机图形库的软件借口。开放式图形库能实现建模、光线,色彩处理,变换,动画以及更为先进的高级图形处理技术和能力。高级的图形处理例如纹理的映射,物体运动模糊效果的呈现等,可通过相应的程序制作出具有强烈真实感的三维立体图形。为了有利于机械臂运动要态计算机动画的制作,建立全面的运动姿态的观察体系,机械臂的虚拟模拟应使用OpenGL结合VC++平台来建立
机械臂反震模型的建立可通过两个步骤实现,首先应建立机械
维立体模型,其次应按照机械壁真实受力,功能以
用美部件的一
及连接关系就爱能够各部件组合而成目标模型三维立体的机械臂模型应包含底座,连杆、地面和转动轴等八个部件,面每一条机械背的两个转动关节之间连接,机核肾与底座之间的各关节使用铰接的方式进行约束,从而整个机械臂为开链的机构。机械臂的简化条件为底座以及机械臂均为均质钢体,从面可忽略机械臂关节之间的摩擦作用力。
本系统在VisualC++环境中调用OpenGL的图形函数实现了动态生成机器人模型及伤真系统交互操作功能。在对机械臂的模型绘制前,先应根据相应设备模型的空中运动学方程,分别计算出经过一定实践运动到新位置量以及相关的姿态参数,而后通过调用与
之相关的两个函数,有效确定绘制模型的位置以及要
执行显示列表雨数glC
CallList。实现设备模型的绘制和现实
而后才能
,并且津
立了设备模型的
在机械臂的模型正常显示
,应根据硬
件仿真平台所发送的指令使相应的设备模型在虚拟场录中运动。 OpenGL提供了glTranslate和glRotate两个函数确定了机械臂模型在空间中的具体位置和姿态,从面分别实现了对模型的平移和旋转的变化。giTranslate雨数平移模型到场景中的某点上,而 glRotate函数将处于该点上的模型能转到一定姿态。根据机械肾连杆长度和关节角度计算出雅可比矩阵的各个元素值,再根据各关节转动的角速度日,就可以借助雅克比矩阵求出机械手末端执行器
在笛卡尔空间中的运动速度与加速度。 3、结语
通过分析三杆机械背的运动学特性,推导出了系统的联立约束矩阵,并以此建立了运动学模型,在OpenGL结合VC++平台下进行了建模、仿真和结果验证,为今后进一步研究机械臂的轨连规
划和控制算法奠定了基础。参考文献
[1JCorke PT.A robotics toolbox for MA11,AB.[J].IEEE Robotics and Automat.ion Magazine,1996,3(1):2432.
[2]严勇杰,未齐丹,荐玉基于OpenGL的机械臂控制系统伤真平台研究P).计算机仿真,2006,08(23):252-257.
[3]周芳芳,奖晓平,叶楼.D-H参数表生成三维机器人模型仿真系统[J].系统仿真学报2006.18(4
[4JM F Robinette, R Manseur., ROBOT-DRAK, an Internet-Based Visualization Too] for Robotics Education [J].IEEE Trans. On Education (S00189359).2001.44(1):2934.