您当前的位置:首页>论文资料>桁架机器人在汽车座椅安装生产线中的应用
内容简介
 数控技术
数控技术与用
桁架机器人在汽车座椅安装生产线中的应用
于鹅
(辽宁省机关事务管理局,辽宁沈阳110031)
摘要:本文介绍一种简单析架机器人的应用。汽车总装生产线使用机器人来搬运沉重座椅,不仅减少了劳动力,而且操作方便,定位精度高。虚情机器人可以根据虚持的大小、传输的选近、据放的角度来进行调整。
关键词:新架机器人;何报电机;PLC
中图分类号:TP242
文献标识码:A
柔性化生产在现代化生产线中的使用的越来越广泛。自动化生产线已经成为今后制造工厂的一个必然趋势,机器人的应用将人类从单调繁杂的体力劳动中解放出来,从事更加有创造性的工作。桁架机器人是能够实现自动控制的、基于空间X之U直角坐标系可重复编程的、适合不同任务的自动化设备。在汽车总装生产线上使用桁架机器人来摆放座椅,精度高,摆放位置准确、减少了人力劳动,提高了劳动生产率。
1桁架机器人的构成和工作过程
汽车座椅搬运机器人由手抓、提升轴、旋转轴、传送轴,四个部分组成,系统启动后,自动回到原点位置,机器人进人等待状态,当有座椅排放在上料位置时,机器人自动向下伸出手臂,然后对座椅进行抓取,抓取完成后,提升手臂当提升到安全线以上时旋转手臂到设定好的角度,然后传送到下科位,到达下料位后,将座椅放在下
料位置。完成一个循环后在上料位置继续等待下一个循环。 2座椅机器人系统设计
座椅机器人因为需要传输位置的精确,选用了伺服电机作为执行单元,选用AB一PLC作为控制单元。伺服电机的具有精确度高,转速快、适应性强、稳定性好等优点。在系统运行过程中,因为伺服电机的高精度使座椅上下料位置准确,抓取位置准确。由于伺服电机力矩稳定,转速快可以提高生产节拍,使生产效率得到很大的提高。并且伺服电机重复性好,稳定性好,减少了系统故障发生的次数。通
过定期的维护可以使设备一直完好的运转。 3系统电路设计
系统主电路主要由3台同服电机组成,三台间服电机主要完成座椅提升下降功能、传送上下料位功能,座椅角度定位功能,系统在运行过程中可以使用手动和自动两种方式来运转设备,当采用自动运行时,设备按照设定好的步骤来进行设备的运转。在自动运转之
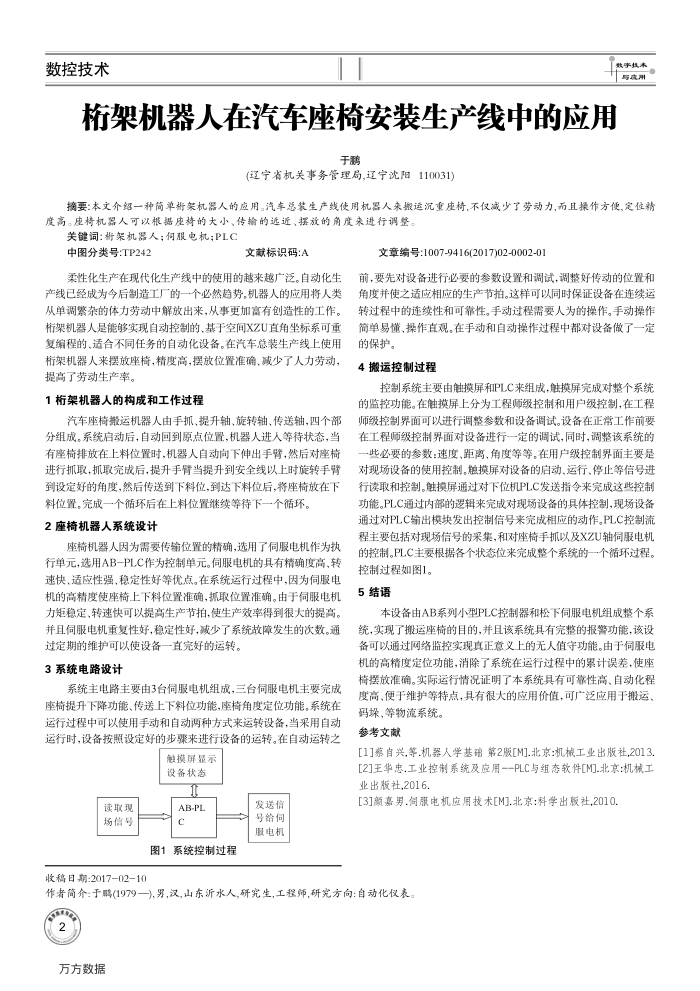
触摸屏显示设备状态
读取现场信号
收稿日期:2017-02-10
AB-PL c
图1系统控制过程
发送信号给伺服电机
文章编号:1007-9416(2017)02-0002-0)
前,要先对设备进行必要的参数设置和调试,调整好传动的位置和角度并使之适应相应的生产节拍。这样可以同时保证设备在连续运转过程中的连续性和可靠性。手动过程需要人为的操作。手动操作简单易懂、操作直观。在手动和自动操作过程中都对设备做了一定的保护。
4搬运控制过程
控制系统主要由触摸屏和PLC来组成,触摸屏完成对整个系统的监控功能。在触模屏上分为工程师级控制和用户级控制,在工程师级控制界面可以进行调整参数和设备调试。设备在正常工作前要在工程师级控制界面对设备进行一定的调试,同时,调整该系统的-些必要的参数:速度、距离、角度等等,在用户级控制界面主要是对现场设备的使用控制,般模屏对设备的启动、运行、停止等信号进行读取和控制。触摸屏通过对下位机PLC发送指令来完成这些控制功能。PLC通过内部的逻辑来完成对现场设备的具体控制,现场设备通过对PLC输出模块发出控制信号来完成相应的动作。PLC控制流程主要包括对现场信号的采集,和对座椅手抓以及XZU轴同服电机的控制。PLC主要根据各个状态位来完成整个系统的一个循环过程。
控制过程如图1。 5结语
本设备由AB系列小型PLC控制器和松下伺服电机组成整个系
统,实现了搬运座椅的目的,并且该系统具有完整的报警功能,该设备可以通过网络监控实现真正意义上的无人值守功能。由于间服电机的高精度定位功能,消除了系统在运行过程中的累计误差,使座椅摆放准确。实际运行情况证明了本系统具有可靠性高、自动化程度高、便于维护等特点,具有很大的应用价值,可广泛应用于搬运、
码探、等物流系统。参考文献
[1]募自兴,等.机器人学基第2版[M].北京:机械工业出版社,2013[2]王华患.工业控制系统及应用--PLC与组态软件[MI.北京机械工业出版社,2016.
[3]额嘉男.间服电机应用技术[M].北京:科学出版社,2010.
作者简介:于鹏(1979一),男,汉,山东沂水人,研究生,工程师研究方向:自动化仪表,万方数据
上一章:新能源汽车用铅酸蓄电池探究
下一章:汽车智能化电子传感器技术应用研究