基于车辆特征和SIFT光流的前方汽车图像信号识别
内容简介
 应用研究
应用研究基于车辆特征和 SIFT
光流的前方汽车图像信号识别
褚玮周皓
(苏州大学物理与光电・能源学部江苏苏州215000)
数事共与质用
摘要:基于行车前方的场景图像,该文提出了一种融合车底用影、车道线和SIFT(尺度不变特征变换)光流的汽车识别方法。用高斯拟合法算出路面区城的灰度值生成二值图,结合水平边嫁检测获得车底明影再根据车道线等场景信息建立候选汽车区域:在设置的三个感兴趣的特征区域中,用尺度不变特征变换匹配生成特征光流场,进而识别车道上汽车位置及择车状态。结果表明:该方法检测情况稳定,准确率高检测站果可应用于汽车驾驶辅助系统
关键词:SIFT光流场特征区车底阴影中图分类号:TP391.41
文献标识码:A
基于视觉的汽车识别在汽车驾驶辅助系统中占据重要价值,能提供给驾驶员汽车行驶环自身状态包括速度、方向等)、车辆间距、占道情况等。
光流场是一个二维失量场,可理解为三维运动场在成像平面上的投影,反映了图像上每一点灰度的变化趋势,是一种对真实运动场的近似估计。光流运动分析主要包括两个步骤:第一步,由时变图像序列的连续两顺或多顿图像计算光流场,第二步,解释所得的光流场,检测观察场景中的运动,推断运动参数和运动物体的表面结构。
1生成可靠光流场
1.1SIFT特征
实际行车环境中前车图像序列是在摄像机有抖动、光照有变化、噪声较严重、目标尺度发生变化的情况下获得的。SIFT特征是图像的局部特征,其对靛转、尺度缩放、亮度变化保持不变性,对视角变化,仿射变换、噪声也保持一定程度的稳定性,而对物体运动遮挡、噪声等因素也保持较好的可匹配性,从而可以实现差异较大的两幅图像之间特征的匹配。SIFT算法其基本思想是在尺度空间导找极值点,提取关键点后对关键点附加详细的局部特征信息,生成
图1SIFT图像以及SIFT光流场的可视化表达方法
收稿日期:201605-15
文章编号:1007-9416(2016)08-0072-02
描述器(一个128维度的向量),通过特征点的两两比较找出相互匹配的若于对特征点,从而建立了目标闻的对应关系。
1.2SIFT光流场
通过计算每个像素点128维度的SIFT特征向量,整个图像区域构成一个SIFT图像,为了将可视化,将每个SIFT特征向量通过最主元分析选择前3个主元投射到3维的RGB颜色空间,生成了如图1中左图的效果,图中相同的颠色部分意味着有类似的空间结构。
通过对连续两顿图像的SIFT特征向量的匹配,得到稳定,可靠
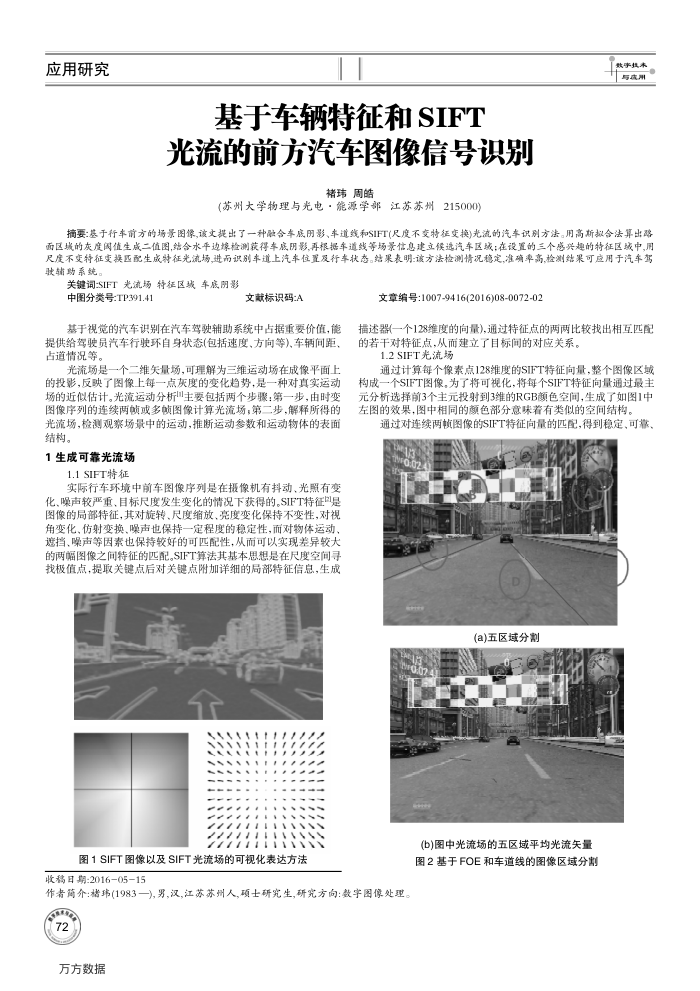
(a)五区域分割
(b)图中光流场的五区域平均光流失量图2基于FOE和车道线的图像区域分割
作者篇介:猪玮(1983一),男,汉,江苏苏州人,硕士研究生,研究方向:数字图像处理。万方数据
上一章:绿色制造汽车企业信息系统浅析
下一章:汽车维修行业存在的问题分析及有关建议