您当前的位置:首页>论文资料>具有丢包的短时延网络控制系统的观测器控制
具有丢包的短时延网络控制系统的观测器控制
内容简介
 数控技术:
数控技术:数字技术与应用
具有丢包的短时延网络控制系统的观测器控制
读盖事
(南京大学工程管理学院江苏南素210093)
摘要:本文将具有丢包的短时延网络系镜看成是被控对象输入矩降和控制器对象输入矩降分别切换的同题,透而将网络控制系统看成是由矩降切换决定的切换律未知的切换系统,将丢包等效为切换系统中子系统之间的切换。采用手雅普诺夫面数方法,设计了基于观测器的状态反馈控制器。利用线性超降不等式的可行解给出了计算状态现测器和控制器参数的方法。录后通过仿真算例验证了该方法的有效性。
送确定性丢包状态观测荐线性超降不等式
关键调;网络控制系统短时延
中图分类号:TP273 1.引言
文献标识码:A
文编号:1007-9416(2011)04-0001-02
开,开关的输出保持之前的值。
网络控制系统NCS(NetworkedContro 1System),是指将传感器、执行着和控制单元作为网络节点连接起来,通过计算机网络和总线形成闭环控制回路,共同完成控制任务的反馈控制系统。和传统的控制系统相比,网络控制系统避免了彼此间专线的敷设,而且可以实现资源共享、远程操作和控制,提高系统的诊断能力、方便安装与维护,并能有效减少系统的重量和体积,增加系统的灵活性和可靠性。因此越来越受到人们的关注。
网络时延和丢包是造成系统性能下降的主要因素,文献IH明考虑了短时延系统的状态反馈、输出反馈和状态观测器反馈控制,以及具有丢包系统的状态反馈控制
本文采用伯努利随机变量来描述数据报的丢失,对同时存在测量数据和控制数据丢失的短时延网络控制系统,采用矩阵不等式的方法给出了动态输出反馈控制器存在的充分条件,所设计的控制器使得闭环系统
在均方意义下使得闭环系统指数稳定。 2、系统模型(如图1)
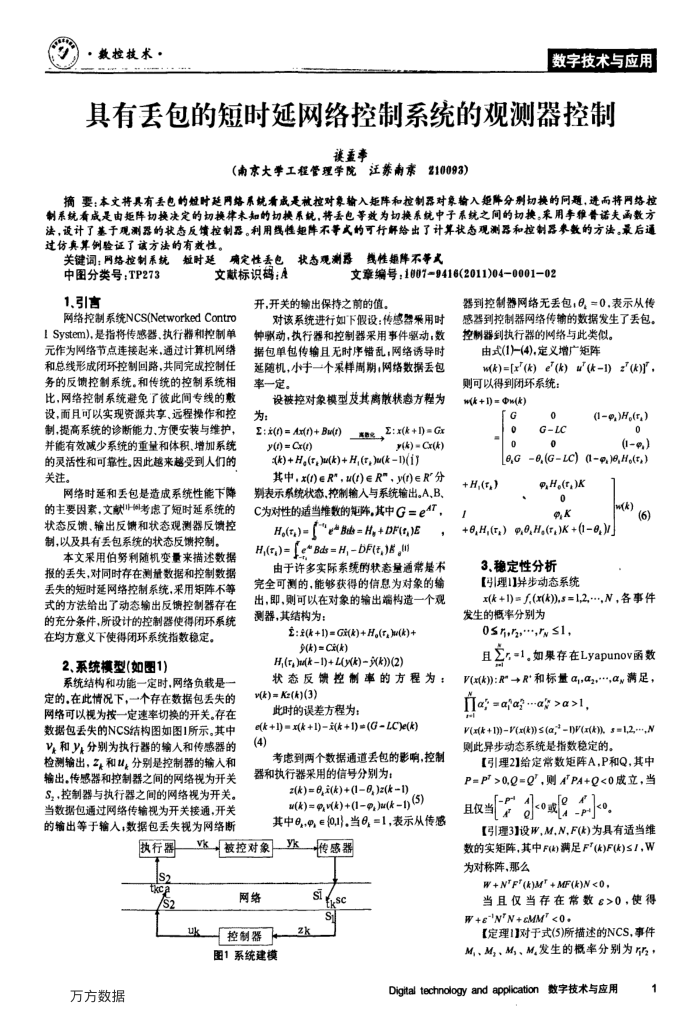
系统结构和功能一定时,网络负载是定的,在此情况下,一个存在数据包丢失的网络可以视为按一定速率切换的开关。存在数据包丢失的NCS结构图如图1所示。其中 V,和Y分别为执行器的输人和传感器的检测输出,2,和u,分别是控制器的输人和输出。传感器和控制器之间的网络视为开关 S,,控制器与执行器之间的网络视为开关。当数据包通过网络传输视为开关接通,开关的输出等于输人;数据包丢失视为网络断
对该系统进行如下假设:传感器采用时钟缴动,执行器和控制器采用事件驱动:数据包单包传输且无时序错乱,网络诱导时延随机,小于一个样周期,网络数据丢包率一定。
设被控对象模型及其离敏状态方程为
为:
E: i(t) = Ax(r)+ Bu(t) y(0)=Cr(0)
高之_Z: x(k+I)=Gx
y(k) = Cx(k)
(k)+ H,(t, )m(k)+ H,(r, )(k1)(i)
其中x()eR",u()eR",(t)eR"分别表承系统状态,控制输人与系统输出。A,B C为对性的适当维数的矩阵,其中G=e4T,
Ho()-gB-H,+DF()E H,(t,)= e"Bds=H, DF(t,)E m)
由于许多实际系统的状恋量通常是术完全可测的,能够获得的信息为对象的输出,即,则可以在对象的输出端构造一个观测器,其结构为:
: (k +1)= G(k)+ H(r, (k)+(k) =Ca(k)
H,(t, )m(k1)+ L((k)(k)(2)
状态反馈控制率的方程为: v(k)= K2(k)(3)
此时的误差方程为:
e(k +I) = x(k +1) (k + 1) = (G - LC)e(k)(4)
考虑到两个数据通道丢包的影响,控制器和执行器采用的信号分别为:
2(k)= 6,(k)+ (16, )z(k 1)(k)=(k)+(1)(k-1)(5) 其中6,9,e(01).当6,=1,表示从传感
yk_被控对象
执行器 S2 tkca S
万方数据
uk
网络
控制器图1系统建模
yk
传感器 si fsc S
zk
器到控制器网络无丢包:6,=0.表示从传感器到控制器网络传输的数据发生了丢包。控制器到执行器的网络与此类似。
由式(1)-(4),定义增广矩阵
w(k)=['(k) e'(k) u"(k1) 2'(k),
则可以得到闭环系统: w(k+1) = @n(k)
『G 0 0
0 G-LC 0
(1-0,)H,(r,)
0(1--,)
6,G 8,(GLC) (,),H,(t,)
+H,(t,)
9,Ha(t, k
0 9k
+,H,(r,) ,0,H(r,)K +(1,)
3.稳定性分析
【引理1]异步动态系统
w()
(6)
x(k+1)= J.(x(k),s =1,2,, N,各事件发生的概率分别为
OSr.",","S1,
且之,=1。如果存在Lyapunov函数 V(x(k):R"→+R"和标量a,az,"",α满足,"=a..a>a>1
V(x(k+1)V(r(k)(a,*I)V(r(k), s=1,2,--, 则此异步动态系统是指数稳定的。
[引理21给定常数矩阵A,P和Q.其中 P=P>0,Q=Q",则A"PA+Q<0成立,当
o或
且仅当
[ -p-
W + NTp'(k)MT + MF(k)W<0,
当且仅当存在常数e>0.使得 W+"W'N+cMM"<0.
【定理1]对于式(5)所描述的NCS.事件 M,、M、M,、M,发生的概率分别为r,
Digital technology and application数字技术与应用