神经网络逆控制在矿井提升机调速系统中的仿真研究
内容简介
 数事载本与度用
数事载本与度用神经网络逆控制在
矿井提升机调速系统中的仿真研究
王颖
(黑龙江工业学院电气与信息工程系黑龙江鸡西158100)
数控技术
摘要利用神经网络能够通近任意非线性的能力,将其与非线性逆系统相结合对矿并提升机调速控制系统的逆模型进行建模提出了一种新的控制策略。该策略以逆系统理论为侬据,将矿并提升机调速控制系统作为被控对象采用积分器与静态的多层前神经网络相结合的方式.搭建动态神经网络结构,用来通近其逆系统,同时结合经典控制方法,设计出调速系统的PID一神经网络通控制器。仿真结果表明:所设计的系统能够实现对矿并提升机调速的有效控制,具有响应速度快、跟踪能力强的优点,
关键调:矿井提升机神经网络逆系统神经网络送控制器
中图分类号:TM921.5
文献标识码:A
文章编号:1007-9416(2016)02-0005-02
Abstract:Using neural network to the ability to approximate any nonlinear, the and nonlinear inverse system combination, of mine hoist speed control system of the inverse model of the modeling, a new control strategy is proposed. The strategy to inverse system theory as the basis, the mine lifting machine speed control system as the object, the integrator and static multilayer feedforward neural network combimation way, build dynamic neural network structure, used to approximate the inverse system, combined with the clasxical control method, the design of the speed control system of PID neural network inverse controller. The simulation resuls show that the designed system can realize the effective control of engine speed control of mine hoist. A response has the advantages of fist speed, strong tracking ability.
Key Words:mine hoist; neural network; inverse system; neural network inverse controller
随着矿井提升系统自动化程度的提高,如何进一步改善提升机调速控制效果,提高提升设备的动能效率,实现提升机安全可靠运行,降低设备报耗,提高生产效益,已成为一个备受重视研究课题。在实际生产运行中,矿井提升机调速系统受环境参数的影响较大,加上系统本身具有很强的非线性,若想要获取其精确的数学模型则非常困难。而神经网络逆控制是以逆控制理论为基础,结合神经网络能够以任意精度逼近任意非线性函数的特点,利用神经网络逼近矿并提升机调速系统的逆系统,以实现对调速系统的神经网络逆控
制,并可利用Matlab对所设计的系统进行控制和仿真试验。 1矿并提升机控制系统结构的描述
给定频率 r(t)
变频器
导步电机
激倚
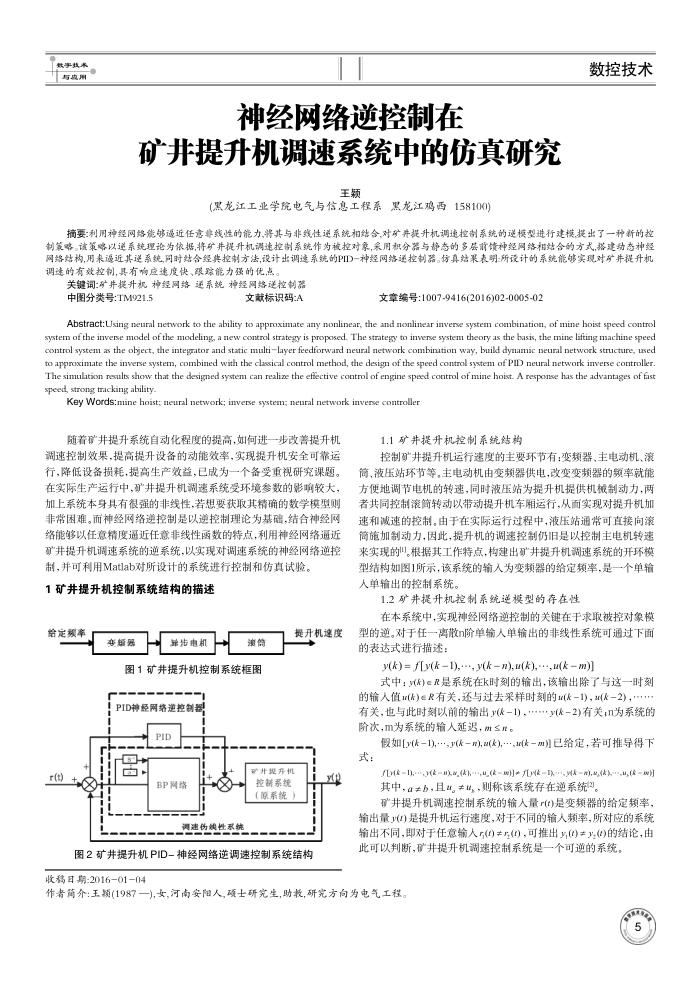
图1矿井提升机控制系统框图!PID神经网络逆控制器
le
提升机速度
矿并提升机控制系统
BP网络
调建伤线性系统
(原系统
图2矿并提升机PID-神经网络逆调速控制系统结构收稿日期:2016-01-04
1.1矿并提升机控制系统结构
控制矿并提升机运行速度的主要环节有:变频器、主电动机、滚简、液压站环节等,主电动机由变频器供电,改变变频器的频率就能方便地调节电机的转速,同时液压站为提升机提供机械制动力,两者共同控制滚简转动以带动提升机车运行,从面实现对提升机加速和减速的控制。由于在实际运行过程中,液压站通常可直接向滚简施加制动力,因此,提升机的调速控制仍旧是以控制主电机转速来实现的,根据其工作特点,构建出矿并提升机调速系统的开环模型结构如图1所示,该系统的输入为变频器的给定频率,是一个单输人单输出的控制系统。
1.2矿并提升机控制系统逆模型的存在性
在本系统中,实现神经网络逆控制的关键在于求取被控对象模型的逆。对于任一离散n阶单输入单输出的非线性系统可通过下面的表达式进行描述:
y(K) = [y(K 1), *, y(k n), u(K), *,u(k m))
式中:(k)eR是系统在k时刻的输出,该输出除了与这一时刻的输人值r(k)eR有关,还与过去采样时刻的r(k-1),r(k-2),有关,,也与此时刻以前的输出(-1),".>(K-2)有关;为系统的阶次,m为系统的输人延迟,m≤几。
假如[y(1),,(-n),α(),,r(m))已给定,若可推导得下式:
[(ar )*n*.(→)***(α )M*-(1 →)M}/ +[(ar→)n*- (*)**( →)(**(1 )(]/ 其中,±b,且。±,,则称该系统存在逆系统。
矿井提升机调速控制系统的输人量r()是变频器的给定频率,输出量3()是提升机运行速度,对于不同的输人频率,所对应的系统输出不同,即对于任意输人()(),可推出()()的结论,由此可以判断,矿井提升机调速控制系统是一个可逆的系统。
作者简介:王额(1987一),女,河南安阳人,颈士研究生,助教,研究方向为电气工程。
上一章:一种基于复杂网络的Hash函数构造
下一章:基于神经网络的医保欺诈主动发现模型