您当前的位置:首页>论文资料>一种机器人计算避开干涉拾取位置的方法
内容简介
 精密制造与自动化设计与开发
精密制造与自动化设计与开发2017年第2期
一种机器人计算避开干涉拾取位置的方法
杨恒亮王鑫
(上海发那科机器人有限公司上海201206)
摘要介绍了一种机器人对料框中散堆工件计算拾取位置的方法。通过对机器人手爪和料框的建模,可以判断在拾取工件时,机器人手爪和料框壁是否存在干涉。如果干涉,那么机器人将根据搜索策略获得一个不存在干涉
的拾取位置,从而提高散堆取件拾取的成功率。关键词机器人散堆取件干涉判断
随着机器视觉技术和机器人结合越来越紧密,视觉系统已经被广泛应用在机器人搬运、涂胶、焊接之中,起到读取信息,补正机器人工作位置和检测尺寸等作用[1-3]。
使用视觉系统实现机器人对料框中散乱堆放工件进行分栋拾取是近年重点研究的技术,可以被广泛应用在诸如金属零部件加工生产线的线首上料、小型零部件加工装配分抹和从料框中分抹物流商品等多种行业中。机器人拾取散堆在料框中的工件系统如图1所示,手爪安装在机器人末端法兰上,工件随机摆放在料框中。3D视觉系统使用专业视觉[ 商开发出的基于结构光大范围3D视觉系统,例如 Enshape,Pick it 3D"、Visio Nerf Cirrus 3D(5]。虽然散乱堆放工件的视觉识别能力有了很大改善,但对料框中散堆工件进行拾取仍难以自动化,主要原因是这此视觉设备仅仅能给出规觉检出的工件位置不考虑机器人拾取工件时手瓜与料框壁发生于涉的情况[6.7],这样导致机器人手爪经常发生碰撞,影响正常生产效率。
爱
手瓜工件
机器人散堆取件系统
图1
万方数据
本文提出一种对料框中散堆工件计算拾取位置的方法,通过对手爪和料框建模,计算出机器人拾取工件时是否存在干涉,如果干涉将自动计算出避开于涉的拾取位置,提高拾取成功率,
手瓜几何建模
手爪几何建模是指将机器人末端的手爪转化为几种几何形状,并以一组参数表示该几何形状的安装位置和外形尺寸。
圆球形工具
1.1
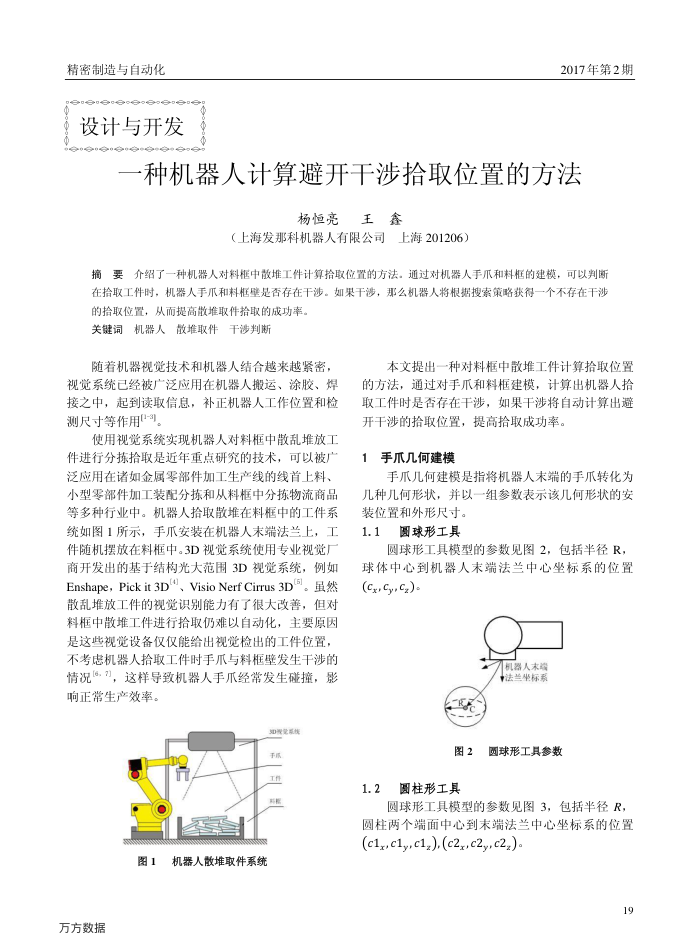
圆球形工具模型的参数见图2,包括半径R,球体中心到机器人末端法兰中心坐标系的位置(cx.Cy.cg)
八机器人水端 +法兰坐标系
图2
1.2
圆柱形工具
球形工具参数
圆球形工具模型的参数见图3,包括半径R,
圆柱两个端面中心到末端法兰中心坐标系的位置(c1.c1y.c1,).(c2.c2.c2,)。
19