您当前的位置:首页>论文资料>基于视觉系统自动生成机器人轨迹的方法
内容简介
 精密制造与自动化试验与研究
精密制造与自动化试验与研究2017年第3期
基于视觉系统自动生成机器人轨迹的方法
杨恒亮王萌班
(上海发那科机器人有限公司上海201206)
摘要介绍了一种基于视觉系统自动生成机器人工作轨迹的方法,其中机器人工作轨迹可以根据工件边缘轮廊形状和位置自动调整。通过视觉系统对工件边缘轮席进行拍照,获取这些轮廊上离散点的空间位置信息。对离散
点进行平移、缩放处理和机器人工具匹配后,可以实现高效、容易、快速地实现对机器人工作轨迹的生成关键词工业机器人视觉系统机器人轨迹
工业机器人"是一种多轴联动,具有灵活工作
轨迹和姿态的工业设备,它具有较强的通用性和较高的可靠性,被广泛地应用于需要空间工作轨迹的场合。根据其工作轨迹的特点可以分为两类:第类的工作位置仅仅是一个或多个彼此独立的位置,在这类应用中,机器人只需要准确地运动到”拾取” 或“放置”位置即可。第二类的工作位置是由一连串连续位置组成的,例如切割,涂胶,弧焊等,在这类应用中,机器人需要通过一连串运动点完成某项工作,这些连续点组成机器人工作轨迹称为连续轨迹。
目前的机器人编程,基本还是通过示教器由人工预先控制机器人到指定位置,机器人工作时只是“再现”预先示教过的位置。这对于第一类需要精确控制点不多的应用是可以应对的,但对于第二类由于工作点数量多,示教工作量大而影响应用。业内已有致力于自动编程离线轨迹的方法,推出了基于仿真环境的连续轨迹离线编程方法(2-4],但这些方法存在以下缺陷:
(1)要求工作轨迹保持一致,如图1实线所示。
如果实际工件轮魔和理论轮廊存在不一致,则无法应对:
(2)现有方法要求连续轨迹和用户坐标系相对位置和仿真时两者相互位置关系完全一致,否则现有方法无法应对。
本文提出了一种基于视觉系统自动生成机器人轨迹的方法,每次机器人工作轨迹自动根据轮廊外
形进行调整。 10
万方数据
工件
理论轮哪
实际轮廓
图1工件实际轮席和理论轮廖不一致
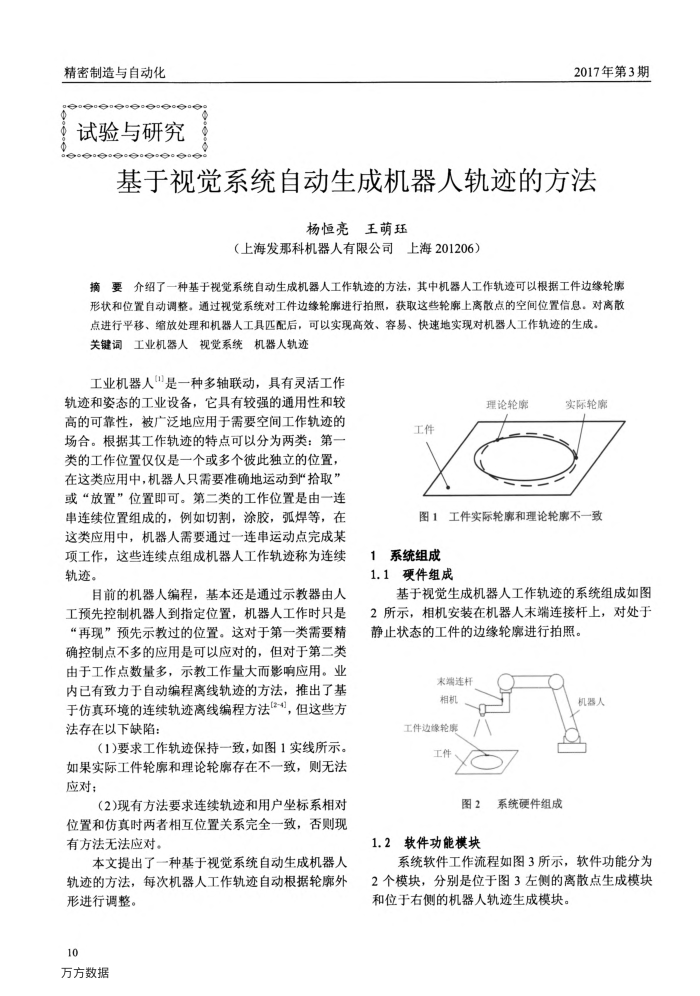
1系统组成 1.1硬件组成
基于视觉生成机器人工作轨迹的系统组成如图 2所示,相机安装在机器人末端连接杆上,对处于静止状态的工件的边缘轮廓进行拍照。
末端连杆
相机
工件边缘轮扇
工件
系统硬件组成图2
1.2软件功能模块
机器人
系统软件工作流程如图3所示,软件功能分为 2个模块,分别是位于图3左侧的离散点生成模块和位于右侧的机器人轨迹生成模块。
上一章:加工后测量在金切自动线上的应用
下一章:西门子S120驱动在数控轧辊磨床上的应用