您当前的位置:首页>论文资料>电动小车电机悬架稳定器的设计研究
内容简介
 实验研究
实验研究电动小车电机悬架稳定器的设计研究作者/王楠、杨立平、龙健,北京电子科技职业学院
搞要:随着车辆技术的高速发展,人们对车辆的稳定性和舒适性的要求越来越高。传统车辆的减震器及弹簧的组合方式只能达到一般的乘坐稳定性及舒适性,其类似往复简调运动的规律已经不能满足人们的需求了,特别是在医疗等特殊领域,在使用担架车时要保证较高的平稳性,从而使诸如骨折等重伤患者的二次伤害降到最低。鉴于此,通过制作电动小车电机悬架来研究提高车辆底盘的平稳性及舒适性的方法就具有极高的实用意义。
关键词:电动;电机;悬架;稳定器
引言
目前车辆的悬架的结构种类众多且性能各异,大体分为
被动悬架和主动悬架两大类。被动架广泛应用于绝大多数乘用车上,分为非独立悬架和独立悬架,后者舒适性虽优于前者,但结构复杂度也高于前者。非独立悬架常见的如扭力染和平行片状弹黄式结构等,独立悬架常见的如麦佛边和多连杆结构等。主动悬架主要就是电磁悬架系统,如通用的 MRC系统,其平稳性和舒适性优于普通被动悬架。蛋然电磁悬架系统性能优感,但高昂的价格和产格技术要求使得其很难走进普通人群。以上悬架系统都存在自身的不足,鉴于此,通过制作电动小车电机悬架来研究提高车辆底盘的平稳
性及舒适性的方法,就具有极高的实用意义。 1.应用需求
普通悬挂系统在遇到颠籁路面时,其进行的是类似往复简谐运动并逐渐衰减,乘用人员还是会有一定的左右前后轻摆晃动,造成一定的不适。要求在一定程度的坑洼路面行进
时,底盘不受路况影响保持车体水平不动。 2.工况分析
根据应用需求,对运动工况进行分析。建立分析模型,
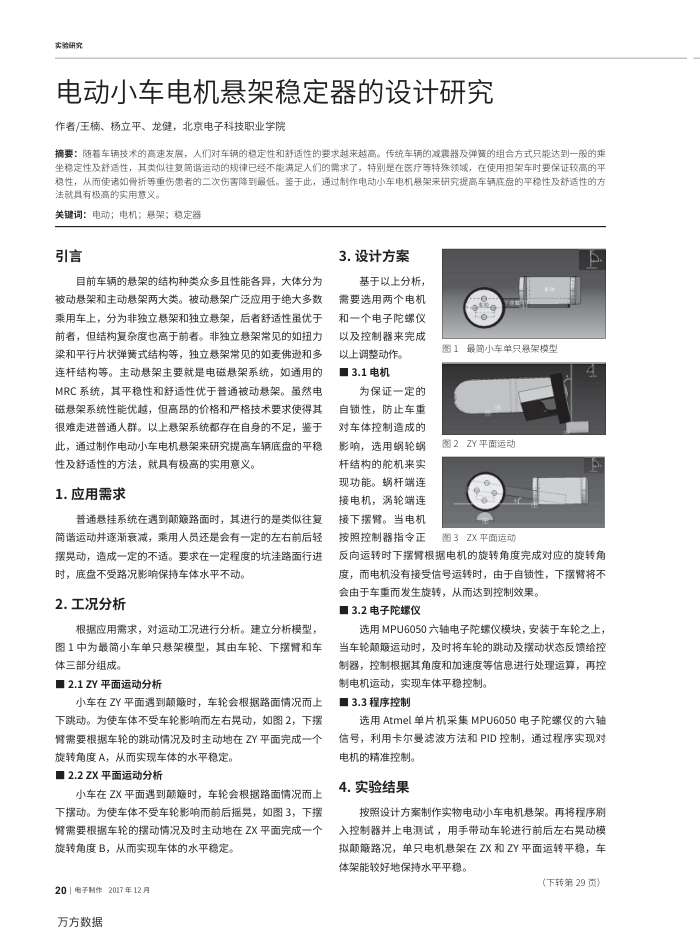
图1中为最简小车单只悬架模型,其由车轮、下摆臂和车体三部分组成。
■2.1ZY平面运动分析
小车在ZY平面遇到颠时,车轮会根据路面情况而上下跳动。为使车体不受车轮影响而左右晃动,如图2,下摆臂需要根据车轮的跳动情况及时主动地在ZY平面完成一个
旋转角度A,从而实现车体的水平稳定 ■2.2ZX平面运动分析
小车在ZX平面遇到颠颠时,车轮会根揭路面情况而上下摆动。为使车体不受车轮影响而前后摇冕,如图3,下摆臀需要根据车轮的摆动情况及时主动地在X平面完成一个旋转角度B,从而实现车体的水平稳定。
20|电子M作2017年12月万方数据
3.设计方案
基于以上分析,需要选用两个电机和一个电子陀螺仪以及控制器来完成
以上调整动作。 ■3.1电机
为保证一定的自锁性,防止车重对车体控制造成的影响,选用蜗轮蜗杆结构的能机来实现功能。蜗杆端连接电机,涡轮端连接下摆臂。当电机按照控制器指令正
图1最筒小车单只悬架模型
图2ZY平面运动图3ZX平面运动
P 4
反向运转时下摆臂根据电机的旋转角度完成对应的旋转角度,而电机没有接受信号运转时,由于自锁性,下摆臂将不
会由于车重而发生旋转,从而达到控制效果。 ■3.2电子陀螺仪
选用MPU6050六轴电子陀螺仪模块,安装于车轮之上,当车轮颠颠运动时,及时将车轮的跳动及摆动状态反馈给控制器,控制根据其角度和加速度等信息进行处理运算,再控
制电机运动,实现车体平稳控制。 ■3.3程序控制
选用Atmel单片机采集MPU6050电子陀螺仪的六轴信号,利用卡尔曼滤波方法和PID控制,通过程序实现对
电机的精准控制。 4.实验结果
按照设计方案制作实物电动小车电机悬架。再将程序刷入控制器并上电测试,用手带动车轮进行前后左右晃动模拟颠簸路况,单只电机悬架在ZX和ZY平面运转平稳,车体架能较好地保持水平平稳。
(下转第29页)
上一章:程控增益射频宽带放大器
下一章:自主无线电中调制识别辅助同步算法研究