您当前的位置:首页>论文资料>水下机械手的研发现状及发展趋势
内容简介
 第25券第3期 2012年5月
第25券第3期 2012年5月文章编号:10026673(2012)0302503
机电产品开发与制新
Derelepmem & Innovation of Machinery & Electrical Prodects
水下机械手的研发现状及发展趋势
王碳,刘涛,高波
(中国船帕科学研究中心,江苏无锡214082)
摘
Vol.25,No.3 May.2012
要:介绍了水下机械手的组成及其特点,对水下机械手的发展情况进行了概述,分析了当前研究中的
关健技术,进一步探讨了水下机械手的发展趋势。
关键调:水下机械手:研发现状:发展趋势
中图分类号:TH136
文献标识码:A
doi:10.3969/j.issn.10026673.2012.03.010
ResearchStateandDevelopmentTrend of UnderwaterManipulator
WANGXuan,LIUTao,GAOBo
(China Ship Scientific Research Center, Wuxci Jiangsu 214082, China)
Abstract: The constitutes and characteristics of underwater manipulator are introduced in the paper.Then the research state is summarized
and key technologies are analysed.At last, trends are given for che future research work. Keywords: underwater manipulator; research state; development trend
0引言
随着石油、天然气等海洋资源的开发从近海延伸到深海,水下机器人成为开发海洋资源的重要工具。作业功能是水下机器人技术开发与应用的关键技术,作为作业功能的主要承担者,水下机械手是大中型水下机器人的必配装置。
1特点与系统组成
与陆上机器人的机械手相比,水下机械手具有以下特点:由于长期浸泡在海水中,要求采用耐腐蚀材料;受到水下机器人上装备的限制,要求微到小型轻量化并设有应急抛奔装置;作业内容由于任务不同且复杂,要求操作灵活例。
水下机械手系统的组成,从结构上可分为从手、操纵装置和控制装置三部分。从手是按照操作者指令动作的机械手,为实际进行水下作业的本体。操纵装置包括操纵机械手发出指令的输出部分以及向操作者反馈信息的部分,由其实现人机对话。控制装置包括根据操纵装置的动作指令对机械手的电机或液压驱动装置进行控
收稿日期:2012-03-21
基金项目:国家高技术研究发展计划(863计则)重大专项资助项目(2002AA401002)
作者介:王策(1981-),女,工程师,项士研充生。主委从事深海水下机器人机电方面的研究、设计及开发工作。
万方数据
制,从手平时收激及伸展的自动控制以及防止从手与本体碰撞的连锁控制等(3-1。
2国外情况 2
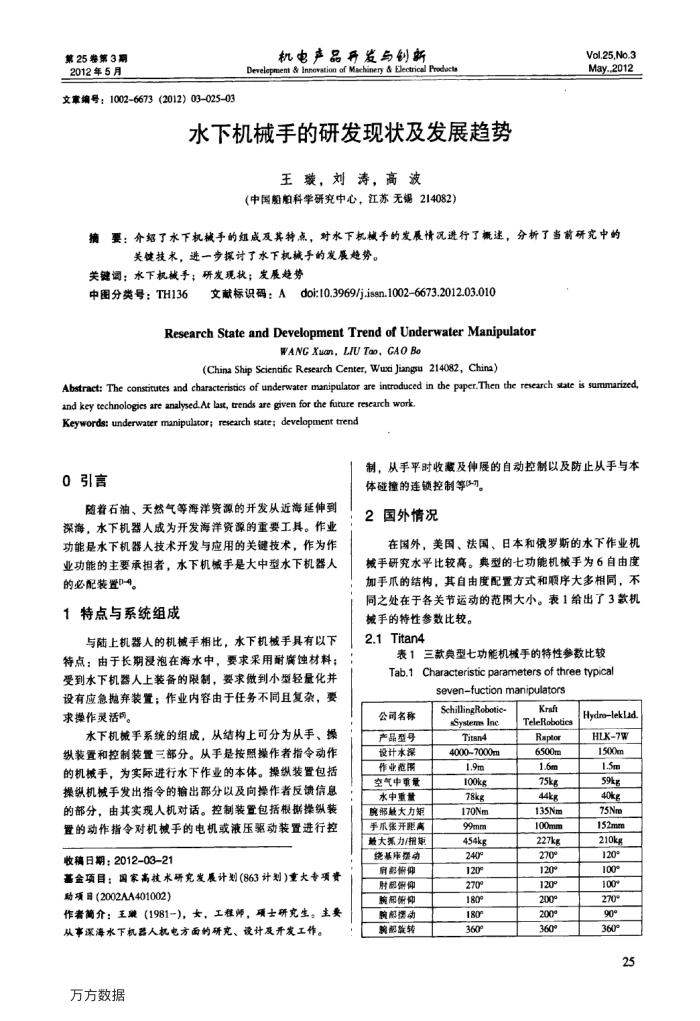
在国外,美国、法国、日本和俄罗斯的水下作业机械手研究水平比较高。典型的七功能机手为6自由度加手爪的结构,其自由度配置方式和顺序大多相同,不同之处在于各关节运动的范围大小。表1给出了3款机
械手的特性参数比较。 2.1Titan4
表1三款典型七功能机械手的特性参数比较 Tab.1 Characteristic parameters of three typical
sevenfuction manipulators
SehillingRobotie-
公司名称产品型号设计水深作业范空气中重量水中重量院部联大力矩手瓜张开距高般大系力/超矩绕基库强动肩部俯仰时部解仰编标解胞解摄动腹郁能转
Systems Inc Titan4 E000L~000% 1.9m 100kg 78kg 170Nm 99mm 454kg 240° 120e 270e 180 180° 360
Kraft
TeleRoboties Rsptor 6500m 1.6m 75kg 44kg 135Nm 100mm 227kg 2700 120° 120° 2000 200 3600
HydrolekLad. HLK-7W 1500m 1.5m 59kg 40kg 75Nm 152mm 210kg 120° 100° 100* 270° e06 360°
25
上一章:聚光型太阳能热电转换系统性能分析
下一章:灌装线码垛机械手的设计与研究