����ǰ��λ�ã���ҳ>��������>SINS���ݶ��жԸ˱�ЧӦ�������о�
SINS���ݶ��жԸ˱�ЧӦ�������о�
���ݼ��
 ��ѧ�ȱ������
��ѧ�ȱ������Ӧ���о�
SINS ���ݶ��жԸ˱�ЧӦ�������о�
�ű�������ѩ��
(�й������ž�91550������������116023)
ժҪ�����ݶ������У����������ӹߵ��������ϵİ�װס�ò�ͬ���ӹߵ����ٶȼƺ����ߵ����ٶȼƻ����е���ͬ�ļ��ٶ�,����������Ǵ�ǿ���еĸ���ЧӦ����������������������Զ�������˶����Ƚϴ�ʱ����Ҫ�ڴ�ͨ�������жԸ˱�ЧӦ��ɵ������в�����������Ը˱�ЧӦ����ԭ��,������ָ������Խ��ٶ��ź�������ȡ�������һ�ּ��㲹������,�������������÷�������Ч������ϵͳʧ�����Ĺ���
�ؼ��ʣ��˱�ЧӦ�����ݶ��ָ�����
��ͼ�����:TJ760 1����
���ױ�ʶ�룺A
���±�ţ�1007-9416(2013)05-0067-03
dr
����ʽ���Ե���ϵͳ�����Դ����������������ϣ�ֱ�Ӳ�������ļ��ٶȺͽ��ٶȡ����������С���۸�ϵͣ�Ŀǰ�õ�����Ӧ�á����������У����ڴ��ڻ����˶��������˶��ָ��ţ��ټ��Ͻ���ʽ���Ե���ϵͳԪ�����������ޣ�������ڽ϶�ʱ���ڲ����Զ���ʽ���нϸ߾��ȵij�ʼ�������ù�����Ϣƥ�䷽���Ĵ��ݶ�ԭ����Ч�ؽ�����������I-4�����ڴ��ݶ������У����������ӹߵ��������ϵİ�װλ�ò�ͬ���ӹߵ����ٶȼƺ����ߵ����ٶȼƻ����е���ͬ�ļ��ٶȣ�����������Ǵ��ݶ��еĸ˱�ЧӦ����������������������Զ�������˶����Ƚϴ�ʱ����Ҫ��
���ݶ������жԸ˱�ЧӦ��ɵ������в����� 2�˱�ЧӦԭ��
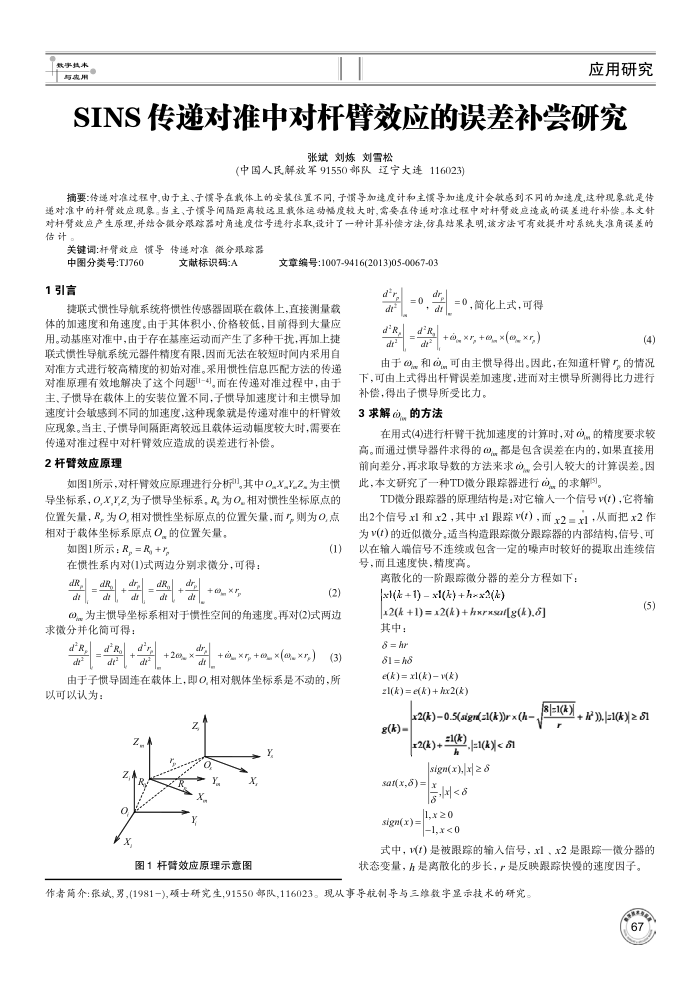
��ͼ1��ʾ���Ը˱�ЧӦԭ�����з���"������0.X_Y_Z.Ϊ���ߵ�����ϵ��O,X,Y,Z,Ϊ�ӹߵ�����ϵ��RΪO��Թ�������ԭ���λ��ʧ����R��ΪO,��Թ�������ԭ���λ��ʧ������r����Ϊ0,��
�������������ϵԭ��O����λ��ʧ������ͼ1��ʾ��R=R,+r��
(1)
�ڹ���ϵ�ڶ�(1)ʽ���߷ֱ����֣��ɵã�
dR,_ dR,] , dr,/ _ dR, , dr,
��+��=��+��=��
+o,��
(2)
@%Ϊ���ߵ�����ϵ����ڹ��Կռ�Ľ��ٶȡ��ٶ�(2)ʽ�������ֲ�����ɵã�
d'R,_ d'r
, dr, p
+26
dr.
+����r, + ��(����r)
p
(3
�����ӹߵ������������ϣ���O,��Խ�������ϵ�Dz����ģ����Կ�����Ϊ��
Z
z, X
X
ͼ1�˱�ЧӦԭ��ʾ��ͼ
Y
dr
dr =0
=0������ʽ���ɵ�
dr
d'R]_ d'R
+_��r, +@��(��_ ��r,)
dr
de2
(4)
���ڡ���@���������ߵ��ó�����ˣ���֪���˱��¡�������£�������ʽ�ó����б������ٶȣ����������ߵ�����ñ�������
�������ó��ӹߵ����ܱ����� 3���@���ķ���
����ʽ(4)���и˱۸��ż��ٶȵļ���ʱ���ԡ��ľ���Ҫ��ϸߡ���ͨ���ߵ�������õġ����ǰ���������ڵģ����ֱ����ǰ���֣�����ȡ�����ķ����������˽ϴ�ļ�������ˣ������о���һ��TD�ָ��������ФΡ������5��
TD�ָ�������ԭ���ṹ�ǣ���������һ���ź�v(t)���������2���ź�xl��x2������xl����v(������x2=x1�������x2��ΪV(t)�Ľ����֡��ʵ���������ָ��������ڲ��ṹ���źš����������˶��źŲ����������һ��������ʱ�Ϻõ���ȡ�������źţ������ٶȿ죬���ȸߡ�
��ɢ����һ���������IJ�ַ������£�
x( + 1) x1(A) + A��x2()
2(h +1)= x2(k)+ hxrxsa[g(),0)
���� S= hr 81=h
e(Kk)= xl(Kk) w(k)
z1(k) = e(K)+ hx2(k)
x2(K)0.5(aign(��(K)rx(h
g(k)=
2()+),1(6
h
sign(x)x��8
sa(x,)=
Jx
s[1,x ��0
sign(x):
1,x<0
(5)
(+ 1 F
ʽ�У�v(t)�DZ����ٵ������źţ�xl��x2�Ǹ���һ������״̬������Ϊ����ɢ���IJ��������Ƿ�ӳ���ٿ������ٶ����ӡ�
����ƪ�飺�ű��У�(1981-),��ʿ�о���,91550����,116023���ִ��µ����Ƶ�����ά������ʾ�������о���
67
��һ�£�OTN�豸��Ӧ��ά�������ϴ���
��һ�£�OFDMͬ�������о�