您当前的位置:首页>论文资料>机器人视觉伺服控制技术及其应用探讨
内容简介
 数控技术
数控技术机器人视觉伺服控制技术及其应用探讨
邱启华
(广东省高级技工学校广东惠州516100)
摘要:机器人视觉伺服控制是将机器视竞与机器人技水进行有机结合而产生的控制技术,其学水基础涵盖了机器人运动学、图像处理、控制理论等研究领或。本文从视伺服系统中基于图像的机器人视觉何服系统入手,在实验条件下,探讨了视梵伺服控制技术在机器人作业系统中的应用,并就视党伺服控制机器人作业系统的实验效果进行了分析。
关键调:机器人视竞伺服作业系统
中图分类号:TP242
文献标识码:A
文章编号:1007-9416(2013)06-0002-02
近年来,工业机器人在以制造业为代表的各个领域得到了广泛的应用,1979年,首先由HILL提出了视觉何服(visualservoing)的概念,并随之出现了多种伺服控制方式,被逐步应用于机器人控制系统之中。视觉伺服在机器人控制系统中的应用,使得机器人更具类人化、智能化的特点,使其对周围多变环境的自适应能力也大大提升。
1机器人视觉伺服系统
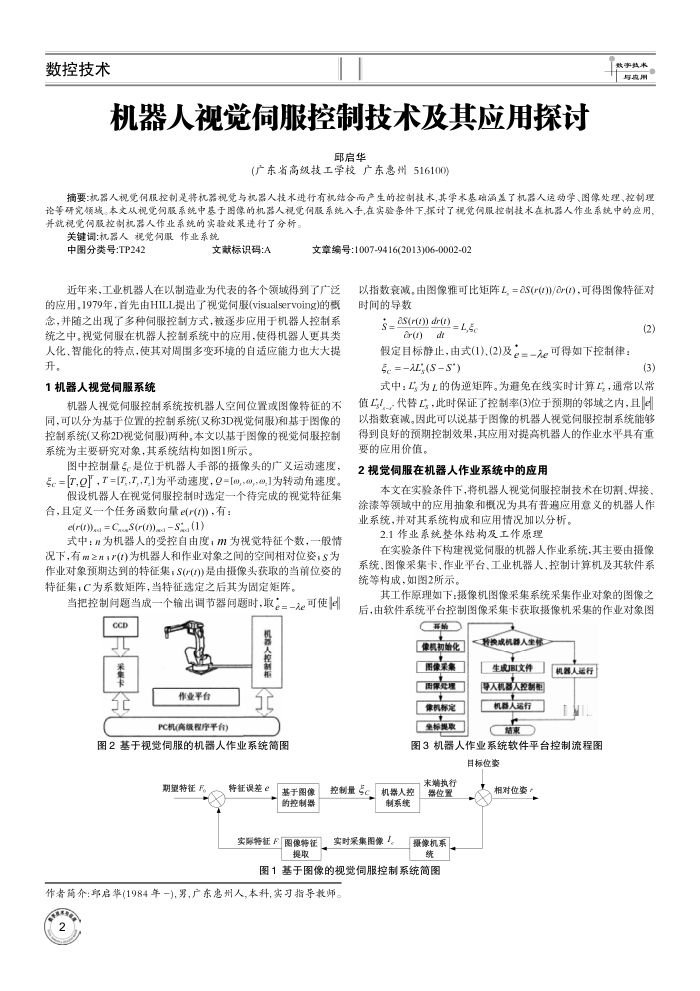
机器人视觉伺服控制系统按机器人空间位置或图像特征的不同,可以分为基于位置的控制系统(又称3D视觉间服)和基于图像的控制系统(文称2D视觉何服)两种。本文以基于图像的视觉何服控制系统为主要研究对象,其系统结构如图1所示。
图中控制量5c是位于机器人手部的摄像头的广义运动速度。=[,,=[7,7,7,]为平动递度,Q[0,,0,]为转动角速度。
假设机器人在视觉伺服控制时选定一个待完成的视觉特征集合,且定义一个任务函数向量e(r(t),有:
e(r(r)sa = Cx,S(r(r)ad S, (1)
式中:n为机器人的受控自由度;m为视觉特征个数,一般情况下,有m≥其r(0)为机器人和作业对象之间的空间相对位姿;S为作业对象预期达到的特征集;S((0)是由摄像头获取的当前位姿的特征集;C为系数矩阵,当特征选定之后其为固定矩阵。
-2可使e
当把控制间题当成一个输出调节器问题时,取::
CCD 亚采集卡
作业平台
PC机(高级程序平台)
机格人控制柜
图2基于视觉伺服的机器人作业系统简图
期望特征F
特征误差e
基于图像的控制器
实际特征下图像特征
提取
以指数衰减,由图像雅可比矩阵L,=aS(r()/αr(),可得图像特征对时间的导数
sas(ro d-L5c
(2)
r()dt
假定目标静止,由式(1)、(2)及。=-e可得如下控制律:
S =A,(SS")
(3)
式中:,为工的伪逆矩阵。为避免在线实时计算工,通常以常值工,代替亡,此时保证了控制率(3)位于预期的邻域之内,且e 以指数衰减。因此可以说基于图像的机器人视觉伺服控制系统能够得到良好的预期控制效果,其应用对提高机器人的作业水平具有重要的应用价值。
2视觉伺服在机器人作业系统中的应用
本文在实验条件下,将机器人视觉伺服控制技术在切割、焊接、涂漆等额域中的应用抽象和概况为具有普遍应用意义的机器人作业系统,并对其系统构成和应用情况加以分析。
2.1作业系统整体结构及工作原理
在实验条件下构建视觉何服的机器人作业系统,其主要由摄像系统、图像采集卡、作业平台、工业机器人、控制计算机及其软件系统等构成,如图2所示。
其工作原理如下:摄像机图像采集系统采集作业对象的图像之后,由软件系统平台控制图像采集卡获取摄像机采集的作业对象图
开物
像机初始化图像采集图保处理像机标定坐标规取
特换成机器人生标
生成JBI文件导人机器人控制柜机器人运行
结束
机器人运行
图3机器人作业系统软件平台控制流程图
目标位委
控制量5c
机器人控制系统
实时采集图像!。
末端执行器位置
摄像机系统
图1基于图像的视觉伺服控制系统简图
作者简介:邱启华(1984年一),男,广东惠州人,本科,实习指导教师
相对位委
上一章:基于LabVIEW的魔方机器人系统设计
下一章:两轮同轴机器人的自平衡控制研究