基于视觉识别的工业机器人分拣系统设计与应用
内容简介
 设计开发
设计开发数事我本与或用
基于视觉识别的工业机器人分抹系统设计与应用
于玲1杜向军2
(1.天津轻工职业技术学院天津300350;2.恩智浦半导体有限公司天津300300)
摘要:随着境代工业智能化,机器视爱技术与智能机器人的发展得到了人们越来越多的关注。本丈研究并试验一种基于视党识别的工业机器人分禁装配系统。它主要实现目标工件的识别、跟踪部取以及入库功能。工件的识别主要由RFID电子标签的读取和视梵的识别,有助于提高工业机器人系统的应用能力
关键词:机器视觉智能机器人分栋装配中图分类号:TP2
文献标识码:A
机器视觉技术与信息技术一样,在强化产业竞争力方面极为重要。此外,具有视觉能力的工业机器人比传统的工业机器人在生产效率方面会有提高,同时,生产安全的问题也会得到改善,因此,对工业机器人视觉技术的研究具有十分重要的意义,作为无线通信技术的射频识别,(Radio FrequencyIDentification,简称RFID),识别特定目标并读写相关数据可通过无线电讯号,而无需机械或光学接触。
本系统主要是基于视觉检测和RFID的分栋人库系统。首先,通过以太网通信工件装配流程编辑软给PLC发送工件装配流程,工件有编号、颜色、高度、形状之分,通过RFID检测由传送带输送,由机械手吸取分栋人工件盒。然后,通过机械手吸取视觉分别对工件盒的
工件进行对比分析,机械手为合格工件盒装上工件盖,人库。 1现场设备
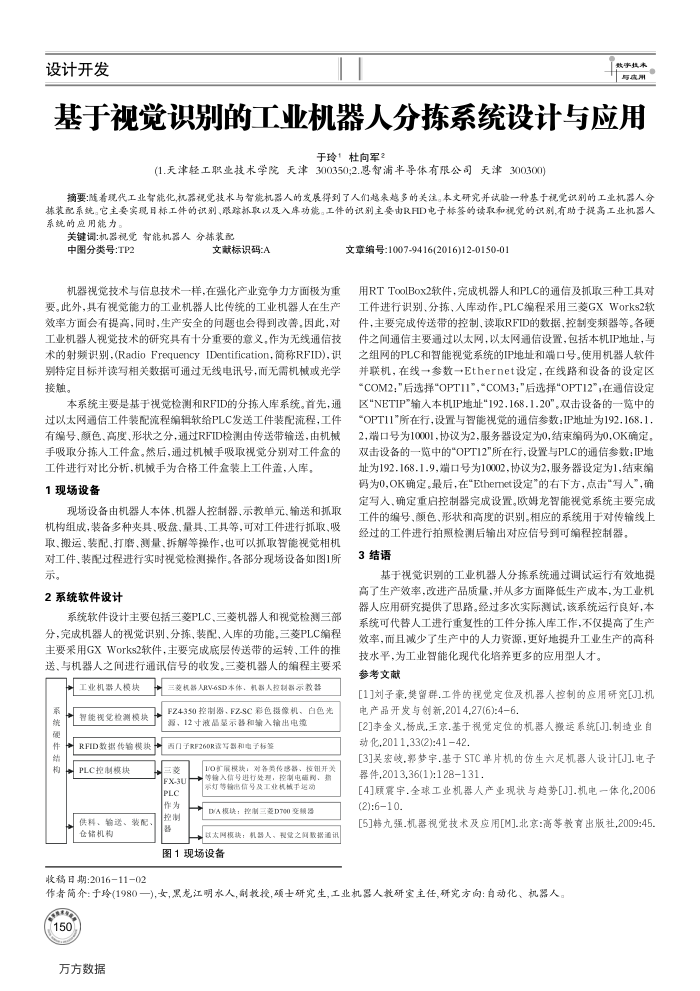
现场设备由机器人本体,机器人控制器、示教单元.输送和抓取机构组成,装备多种夹具、吸盘,量具、工具等,可对工件进行抓取,吸取、搬运、装配、打磨、测量、拆解等操作,也可以抓取智能视觉相机对工件、装配过程进行实时视觉检测操作。各部分现场设备如图1所示。
2系统软件设计
系统软件设计主要包括三菱PLC、三菱机器人和视觉检测三部分,完成机器人的视觉识别、分、装配、人库的功能。三菱PLC编程主要采用GXWorks2软件,主要完成底层传送带的运转、工件的推送、与机器人之间进行通讯信号的收发。三菱机器人的编程主要采
工业机器人模块智能视检测模换
航硬
三美机器人RV-6SD本体、机器人控材器示教器
FZ4350控制器、FZ-SC彩色摄像机、白色光源,12寸液晶量示器和输入输出电现
图RFID数据传输模决西门子RF260R读写器和电子标签
站构
PLC控制模块供料、输适、装配、企铭机构
收稿日期:20161102
三菱 FX-3U PLC 作为控制器
1/0扩展模获:对各美传感器、按钮开关等输入信号进行处型,控制电靠网、势
系灯等输出信号及工业机热于手运动 D/A模块:控制三菱DT00变频器
以太网模失:机器人,畏觉之间致据通讯
图1现场设备
文章编号:1007-9416(2016)12-0150-0)
用RTToolBox2软件,完成机器人和PLC的通信及抓取三种工具对工件进行识别、分栋、人库动作PLC编程采用三菱GXWorks2软件,主要完成传送带的控制、读取RFID的数据、控制变频器等。各硬件之间通信主要通过以太网,以太网通信设置,包括本机IP地址,与之组网的PLC和智能视觉系统的IP地址和端口号。使用机器人软件并联机,在线→参数一→Ethernet设定,在线路和设备的设定区*COM2:"后选择"OPT11","COM3;"后选择"OPT12",在通信设定区“NETIP输入本机IP地址"192.168.1.20”,双击设备的一览中的*OPT11"所在行,设置与智能视觉的通信参数:IP地址为192.168.1. 2,端口号为10001,协议为2,服务器设定为0,结束编码为0,OK确定,双击设备的一览中的"OPT12"所在行,设置与PLC的通信参数:IP地址为192.168.1.9,端口号为10002,协议为2,服务器设定为1,结束编码为0,OK确定。最后,在"Ethermet设定"的右下方,点击"写人",确定写人、确定重启控制器完成设置。欧姆龙智能视觉系统主要完成工件的编号、颠色,形状和高度的识别。相应的系统用于对传输线上
经过的工件进行拍照检测后输出对应信号到可编程控制器。 3结语
基于视觉识别的工业机器人分系统通过调试运行有效地提高了生产效率,改进产品质量,并从多方面降低生产成本,为工业机器人应用研究提供了思路。经过多次实际测试,该系统运行良好,本系统可代替人工进行重复性的工件分人库工作,不仅提高了生产效率,而且减少了生产中的人力资源,更好地提升工业生产的高科
技水平,为工业智能化现代化培养更多的应用型人才。参考文献
[1]刘子豪,樊留群.工件的视觉定位及机器人控制的应用研究[门机电产品开发与创新.2014,27(6):4-6
[2]李金义.杨成,王京.基于视觉定位的机器人搬运系统[J].制造遗业自动化,2011,33(2):4142.
[3]吴安歧,郭梦宇.基于STC单片机的仿生六足机器人设计[J].电子器件,2013,36(1):128131.
[4]顾震宇.全球工业机器人产业现状与趋势[J].机电一体化.2006(2):610.
[5]转九强.机器视觉技术及应用[M].北京:高等教育出版社,2009:45
作者简介:于玲(1980一),女黑龙江明水人,制教投,硕士研究生,工业机器人教研室主任,研究方向:自动化、机器人 5
万方数据
上一章:两轮同轴机器人的自平衡控制研究
下一章:基于传感器应用技术的移动机器人研究