您当前的位置:首页>论文资料>北斗导航终端抗干扰技术设计与实现
内容简介
 数事本与度用
数事本与度用北斗导航终端抗干扰技术设计与实现,
刘小波练灿明
(陕西烽火电子股份有限公司陕西宝鸡
721006)
设计开发
摘要:卫呈导航系统在军事领或发挥着越来越重要的作用,但是卫星导航终端极易受到有意或无意的电疆干扰而无法正常工作,设计具有高抗干抚性能的导航定位终端,可以保障用户在复奈电磁环境下获取可靠的导航定位服务。本文主要介绍了北半导航终端常见的几种抗干扰技术及特点,简速了数字滤波抗干扰和波束形或抗干扰方法的原理与实现方法,对这要技术的优缺点进行了对比分析,最后崩述了北斗导航终端抗干扰终端的实现方法
关键词:北斗导航终瑞抗干扰
中图分类号:TN973.3 1引言
文献标识码:A
随着北斗导航定位技术在军事装备中的广泛应用,卫星导航终端容易受到多种形式的有意和无意干扰,在战争中人为有意的干扰危害性更大。
具有抗干扰特性的接收机具有应对复杂电磁环境和敌方主动干扰情况下的精确定位能力,可以显著地提高系统的抗干扰能力。
由于北斗卫星的发射功率较小,到达地面用户接收机时相当微弱(北斗卫星导航信号大约为一160dBW),比接收机热噪声还要低约 20dB,从而使得北斗终端容易受到来自地面或近地空闻的电磁干扰。使得接收机的载波跟踪环中的热噪声抖动增加,从而增加了伪距测量中的误差,当这些测量值被加人导航解算中,最终将影响接收机的定位精度。因此,在干扰环境下提高北斗导航定位精度,必须采取措施提高北斗终端的抗干扰能力。
对北斗导航终端的干扰大致可分为两种:一是压制式干扰,二是欺骗式干扰,压制式干扰是用干扰机发射很强的干扰信号,阻塞导航终端设备,使微波电路接收的信号无法正确的被处理,面导致接收机性能下降或丧失。欺骗式干扰是利用伪基站发射假的卫星信
号,使得导航终端跟踪假卫星而无法获得正确的定位信息。 2抗干扰处理技术
对北斗导航终筛,抗压制式干扰技术主要有数字滤波技术、空间波束形成技术,自适应天线调零技术等儿种。
数字滤波抗干扰技术主要包括基于单天线的滤波技术和基于阵列天线的滤波技术。基于单天线的滤波技术包括时域、频域滤波技术两种,基于阵列天线的滤波技术包括空域、空时自适应滤波技术,以及空间波束形成技术。
2.1时城滤波技术
时域滤波技术可滤除窄带干扰、单频干扰、扫频干扰等,干扰总带宽不大于信号带宽10%。主要运用数字信号处理方法实现可编程 IIR/FIR滤波器,能有效抑制大于40dB的干扰信号,但时域滤波技术无法区分干扰信号和有用信号,会对卫星信号造成损失,面降低接收机性能。
2.2频城滤波技术
频域滤波处理可滤除窄带干扰、单频干扰。该技术是通过离散博立叶变换(DFT),把接收信号转换到频域进行处理,与时域技术相收稿日期:201604-20
文章编号:1007-9416(2016)06-0167-02
比,频域处理方法具有滤波过程简单,动态范围大,能提供更大的零陷深度等特点,频域滤波抑制干扰大于45dB以上,干扰总带宽不大于信号带宽10%。
2.3空城滤波技术
空域滤波技术采用多个阵元的天线阵列,采用干扰信号与有用信号的角度相互独立,将干扰信号分离,使得增益零点指向干扰源方向,从而降低干抗源对有用信号的影响。
空域滤波它利用每个天线阵元收到的信息,通过波束成形中权值的精确控制,同时获得深的零陷和增强的波束增益。空域抗干扰滤波技术可以使导航终端抗干扰能力提高50dB~60dB。
2.4空时自适应滤波技术
空时自适应处理(STAP)是通过空时联合处理多阵元(空域)与多个时域接收到的数据,使干扰抑制在空时二维空间中进行。空时自适应处理技术克服了空域滤波的不足,在不增加阵元的前提下提高了阵面的自由度。
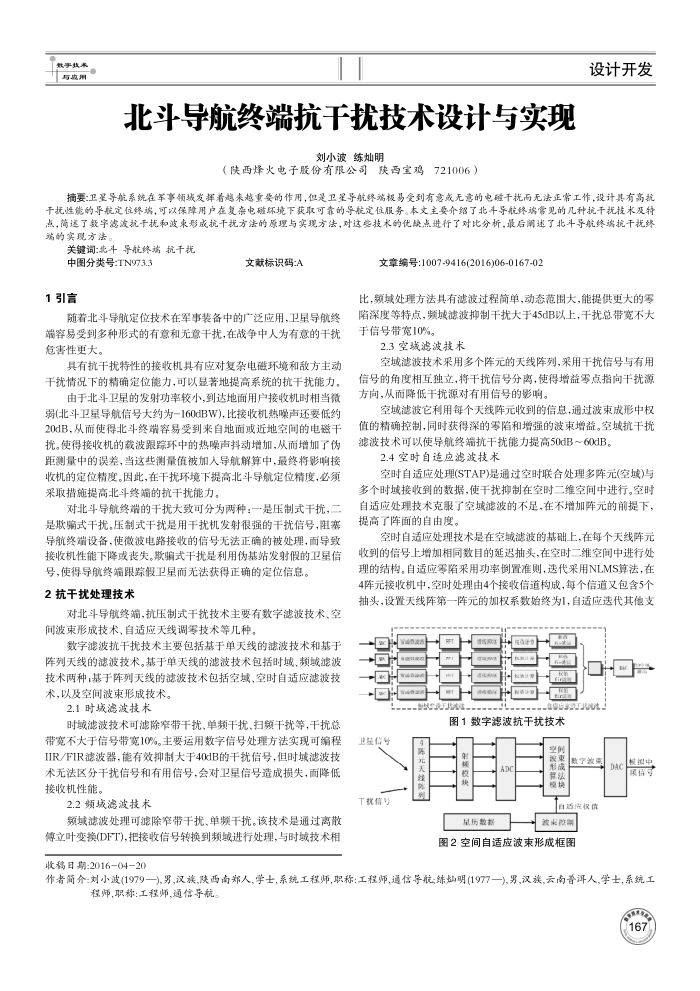
空时自适应处理技术是在空域滤波的基础上,在每个天线阵元收到的信号上增加相同数目的延迟抽头,在空时二维空闻中进行处理的结构,自适应零陷采用功率倒置准则,送代采用NLMS算法,在 4库元接收机中,空时处理由4个接收信道构成,每个信道又包含5个抽头,设置天线阵第一阵元的加权系数始终为1,自适应送代其他支
wanaa
R
OT
图1数字滤波抗干扰技术
卫星信号下信号
线
量历数据
空所
细螺械股字策事
道产权售波来控制
图2空间自适应波束形成框图
根报中频信号
作者简介:刘小(1979一),男,汉族,陕西南郑人,学士,系统工程师,职称:工程师,通信导航;练灿明(1977一),男,汉族,云南普洱人,学士,系统工
程师,职称:工程师,通信乎航
167
相关文章
SC/T 6070-2011 渔业船舶船载北斗卫星导航系统终端技术要求
JT/T 766.1-2019 北斗卫星导航系统船载终端第1部分:技术要求
JT/T 766.1-2019 北斗卫星导航系统船载终端 第1部分:技术要求
GA/T 1481.2-2018 北斗/全球卫星导航系统公安应用第2部分∶终端定位技术要求
GA/T 1481.2-2018 北斗/全球卫星导航系统公安应用 第2部分:终端定位技术要求
JJF 2125-2024 天通北斗一体化高精度导航定位终端校准规范
GA/T 1481.5-2018 北斗/全球卫星导航系统公安应用第5部分∶车载定位终端
GA/T 1481.5-2018 北斗/全球卫星导航系统公安应用 第5部分:车载定位终端