您当前的位置:首页>论文资料>金属物体探测定位器的设计
内容简介
 设计开发
设计开发金属物体探测定位器的设计
胡乾尹力张斌陈霞肖旭桂恒宇(汉口学院湖北武汉430212)
与或用
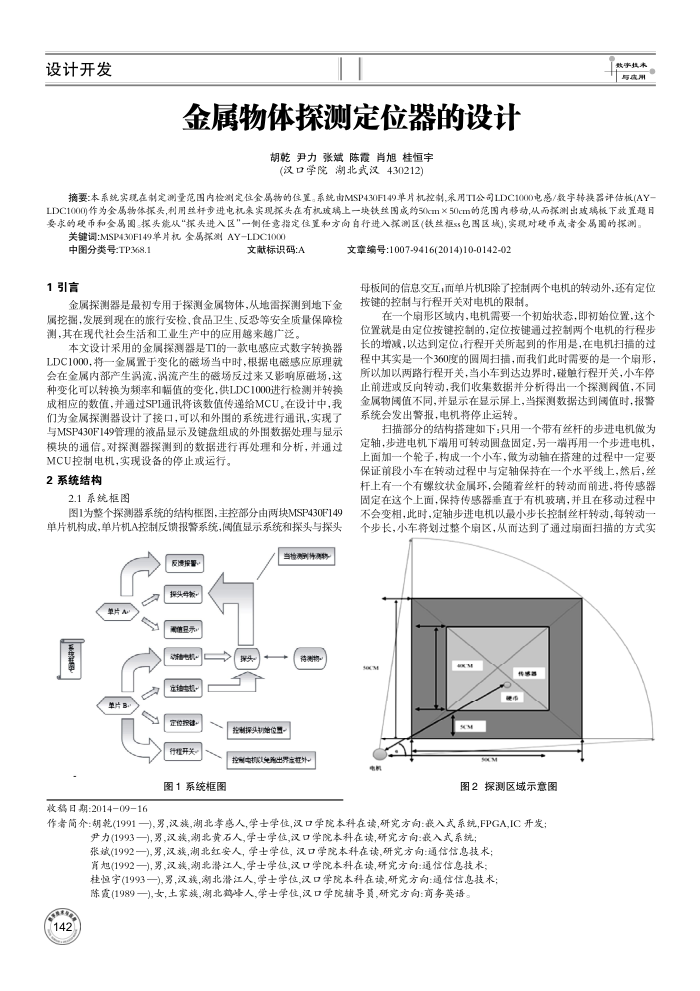
摘要:本系统实在制定测量范图内检测定位金属物的住置。系统由MSP430F149单片机控制,采用T1公司LDC1000电感/数字转换器评估板(AY-LDC1000)作为金属物体探头利用丝杆步进电机来实现探头在有机玻编上一块铁丝图成约50cmX50cm的范图内移动,从而探测出玻编板下放置题目要求的硬币和金属图。探头能从“探头进入区"一侧任意指定住置和方向自行进入探测区(铁丝框≤s包图区城),实现对硬币或者全属圈的探测。
关键词:MSP430F149单片机全属探测AY-LDC1000
中图分类号:TP368.1 1引言
文献标识码:A
金属探测器是最初专用于探测金属物体,从地雷探测到地下金属挖掘,发展到现在的旅行安检、食品卫生,反恐等安全质量保障检测,其在现代社会生活和工业生产中的应用越来越广泛。
本文设计采用的金属探测器是T的一款电感应式数字转换器 LDC1000,将一金属置于变化的磁场当中时,根据电磁感应原理就会在金属内部产生涡流,涡流产生的磁场反过来又影响原磁场,这种变化可以转换为频率和幅值的变化,供LDC1000进行检测并转换成相应的数值,并通过SPI通讯将该数值传递给MCU。在设计中,我们为金属探测器设计了接口,可以和外围的系统进行通讯,实现了与MSP430F149管理的液品显示及键盘组成的外围数据处理与显示模块的通信。对探测器探测到的数据进行再处理和分析,并通过
MCU控制电机,实现设备的停止或运行。 2系统结构
2.1系统柜图
图1为整个探测器系统的结构框图,主控部分由两块MSP430F149 单片机构成,单片机A控制反馈报警系统,阔值显示系统和探头与探头
速报
单片 B
全制探头机始位型
行载并关
图1系统框图
稿日期:2014-09-16
空制中电出界主托外)
文章编号:1007-9416(2014)10-0142-02
母板间的信息交互,而单片机B除了控制两个电机的转动外,还有定位按键的控制与行程开关对电机的限制。
在一个扇形区域内,电机需要一个初始状态,即初始位置,这个位置就是由定位按键控制的,定位按键通过控制两个电机的行程步长的增减,以达到定位,行程开关所起到的作用是,在电机扫描的过程中其实是一个360度的圆周扫描,而我们此时需要的是一个扇形,所以加以两路行程开关,当小车到达边界时,磁触行程开关,小车停止前进或反向转动,我们收集数据并分析得出一个探测阅值,不同金属物阅值不同,并显示在显示屏上,当探测数据达到闻值时,报警系统会发出警报,电机将停止运转。
扫描部分的结构搭建如下:只用一个带有丝杆的步进电机做为定轴,步进电机下端用可转动圆盘固定,另一端再用一个步进电机,上面加一个轮子,构成一个小车,做为动轴在搭建的过程中一定要保证前段小车在转动过程中与定轴保持在一个水平线上,然后,丝杆上有一个有螺纹状金属环,会随着丝杆的转动而前进,将传感器固定在这个上面,保持传感器垂直于有机玻璃,并且在移动过程中不会变相,此时,定轴步进电机以最小步长控制丝杆转动,每转动个步长,小车将划过整个区,从而达到了通过扇面扫描的方式实
SM
电瓶
图2探测区域示意图
作者简介:胡乾(1991一),男,汉族,湖北孝感人,学士学住,汉口学院本科在读研究方向:嵌入式系统,FPGA,IC开发;
尹力(1993一),男,汉族,湖北黄石人,学士学位,汉口学院本科在读,研究方向:嵌入式系统;张斌(1992一),男,汉族,湖北红安人,学士学位,汉口学院本科在读,研究方向:通信信息技术:置旭(1992一),男,汉族,湖北潜江人,学士学位,汉口学院本科在读,研究方向:通信信息技术;桂恒宇(1993一),男,汉族.湖北潜江人,学士学位,汉口学院本科在读,研究方向:通信信息技术:陈霞(1989一),女,土家族,湖北鹤峰人,学士学住,汉口学院辅导,研究方向:商务英语。
相关文章
基于C8051单片机的金属探测器系统设计
基于单片机的不规则物体比重测试仪的设计
结合PCM和GPS定位技术进行埋地管道探测
T/CSNAME 017.7-2021 海洋油气田安防系统规范第7部分∶水面多目标雷达探测定位系统
T/CSNAME 017.2-2021 海洋油气田安防系统规范第2部分∶水下多目标远程探测定位系统
T/CSNAME 017.2-2021 海洋油气田安防系统规范 第2部分 水下多目标远程探测定位系统
T/CSNAME 017.7-2021 海洋油气田安防系统规范 第7部分 水面多目标雷达探测定位系统
T/CSNAME 017.7-2021 海洋油气田安防系统规范 第7部分:水面多目标雷达探测定位系统