结合Kalman滤波器的Mean-shift跟踪算法
内容简介
 数字热本与变用
数字热本与变用算法分析
结合Kalman 滤波器的Mean-shift跟踪算法
张吴
(江西中烟工业有限责任公司江西南昌330096)
摘要:本文首先简单分析了Mean-shift算法的基本原理及Mean-shift向量推导过程,接着通过多组实验的结累,分析和验证了算法的优劣,然后,针对Mean-shift算法本身所存在的缺陷,引入Kalman滤波器,利用Kalman滤波器来预测每慎Mean-shift算法的初始技索位置,然后再运行 Mean-shif算法获得日标位置,同时在跟踪过程中利用预测出的目标速度类量更新Kalman滤波器参数,实现了基于卡尔曼滤波柜架的Mean-shift 算法,实验验证了本算法可以实现对快速运动日标的跟踪,并且对较大比例的日标遂措也具有很好的鲁棒性。
关键词:Mean-shift算法Kalman滤波器线性预测
中图分类号:TP391.41 1算法基本思想
文献标识码:A
文章编号:1007-9416(2013)01-0109-01
采用卡尔曼滤波器来
为了增强Mean-shift算法的适应性,针对算法的缺陷,本文对基本的Mean一shift算法进行改进,弓人Kalman滤波器。这种基于自适应滤波框架的Mean-shift算法有效地减小了背景颜色和障碍物
遮挡对跟踪的影响,提高了算法跟踪的鲁棒性。 2卡尔曼滤波器建模
卡尔曼滤波算法的主要思想是:利用前一慎图像的目标跟踪结果来预测当前横图像中目标的大概位置,然后在该位置附近进行目标搜索,如果搜索区域内存在目标,则继续处理下一慎图像,否则,将搜索区域扩大,重新搜索当前慎图像,或者丢弃前一赖图像,直接处理下一赖图像。算法的关键在于预测搜索区域的位置。它不仅可以任意一点作为观测起点,而且具有计算量小,可实时计算的特点,因此本文采用Kaiman滤波器来估计目标运动参数,然后利用均值漂移算法搜寻目标在当前慎的真实位置。
卡尔曼滤波器包括两个模型:系统运动方程:
X, =A.X,-, +W, 系统观测方程: Z, =H-X, +V
(1)(2)
式中,状态向量Xk=x,y,dx,dyIT,测量向量Zk=[x,yIT,x和 dx分别是目标图像在水平方向的位置和运动速度;y和dy分别是目标图像在垂直方向的位置和运动速度。Wk和Vk分别为正态分布的过程和测量噪声向量,p(w)~V(0,9)p(v)~V(0,R)。状态传递矩阵 A,测量矩阵H,处理噪声Wk的协方差矩阵Q,测量噪声Vk的协方差矩阵R的值如下:
1
010 =..1.
[1000
10100
000
[10
0=
H
R
0010
0100]
[o]
0001
3遮挡处理与线性预测
3.1避挡处理
0001
算法的一次执行可以大致描述为:在k一1时刻利用卡尔曼滤波器估计k时刻的目标位置,同时以此位置作为下一步Mean一shift算法搜索窗口的中心,然后在该中心位置的邻域内采用Mean-shift算法送代查找目标的真实位置,之后再以此真实位置更新卡尔曼滤波器的观测值,预测k十1时刻的目标位置。在算法处理连续几后,可以统计出目标中心的位置信息,根据这些位置信息可以估计目标运动的速度失量产并以此更新卡尔曼滤波器的观测方程中的测量噪声向量V。在实验中,设一个判决门限值α,如果巴氏距离d(y)>α 时,说明发生目标被避挡的情况,此时不能用Mean一shif确定目标的跟踪位置,可以结合之前通过线性预测估计出的速度失量立,并
实现跟踪,同时不断地计算d(y)直到其小于门限值(遮挡比例减小),于是重新启用 Mean-shift算法来完成跟踪。具体算法流程见图1。
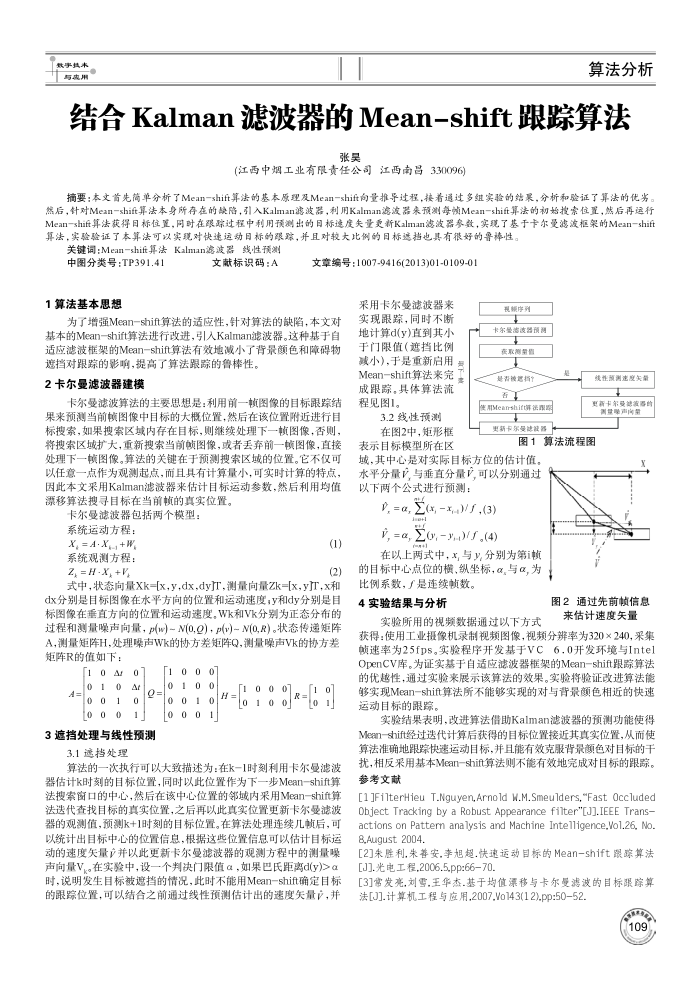
3.2线性预测在图2中,矩形框
表示目标模型所在区
现频序列
卡杂量法液器预图
t
产取测量售
是者技相中香
Meanshit算送东
线性预测速度实量更新卡杂受键发零的周量单声量
更新卡东受建发器
图1算法流程图
域,其中心是对实际目标方位的估计值。水平分量亡与垂直分量亡,可以分别通过
以下两个公式进行预测: P,=α,( -x/F,(3) 便
, =, (o,)/J ,(4)
在以上两式中,x与义分别为第慎的目标中心点位的横、纵尘标,α,与α,为
比例系数,厂是连续顿数。 4实验结果与分析
实验所用的视频数据通过以下方式
X
图2通过先前慎信息来估计速度失量
获得:使用工业摄像机录制视频图像,视频分辨率为320×240,采集速率为25fps。实验程序开发基于Vc6.0开发环境与Intel OpenCV库。为证实基于自适应滤波器框架的Mean-shift跟踪算法的优越性,通过实验来展示该算法的效果。实验将验证改进算法能够实现Mean-shift算法所不能够实现的对与背录颜色相近的快速运动目标的跟踪。
实验结果表明,改进算法借助Kalman滤波器的预测功能使得 Mean-shift经过送代计算后获得的目标位置接近其真实位置,从而使算法准确地跟踪快速运动目标,并且能有效克服背景颜色对目标的干扰,相反采用基本Mean-shift算法则不能有效地完成对目标的跟踪。参考文献
[1 JFiiterHieu T.Nguyen,Arnold w.M.Smeulders,"Fast Occluded Object Tracking by a Robust Appearance filter"[JJ.IEEE Trans-actions on Pattern analysis and Machine Intelligence,Vol.26, No. 8,August 2004.
[2]未胜利.朱善安.李旭超.快速运动目标的Mean-shift跟踪算法[J].光电工程,2006.5,pp:6670
[3]常发亮,刘雪.王华杰.基于均值漂移与卡尔曼滤波的目标限踪算法[J].计算机,工程与应用,2007,Vo143(12),pp:50-52.
109