您当前的位置:首页>论文资料>交流传动中的智能控制策略
内容简介
 数字技术与应用
数字技术与应用[摘分析。
交流传动中的智能控制策略
杨国字
(合肥蓝鸥自控科技有限公司
安徽合肥
230000)
技术前沿
要]文章介绍了交流传动中的基于模型的控制策略和不依赖模型的控制策略,着重就不依赖模型的先进控制策略选行了对比
[关键词]智能化
交流电机
[中图分类号]TP393 引言
控制
交流传动代替直流传动已成为不可逆转的趋势,由于交流电机的非线性多变量耦合性质,其控制策略的研充引起很多学者的兴函。从控制原理和电动机模型出发,基于稳态模型的控制策略和基于动态模型的控制策略研究已经进入实用阶段,有些控制方法已经非常成熟,但
是从本质上看多变量系统
交流电动机还是非线性应该在非线性控制理论的
基础上研究其控制策险
向题的本质性化控制,
才能真正据示
非线性反馈解耦与精确线基于无源性的能量成型非线
基于逐步后推设计方法的非线
性控制,
性控制等等
虽然在理论上
成果累累,
但
由于它们的共同基础
出是已知参数的电机
模型,参数的变化仍不可避免地要影响控
制系统的鲁梯性
滑模变结构控制能使
控制效果与被控对象的参数和扰动无关,
[文献标识码]A
[文章编号]1007-9416(201005006802
因而使系统具有很强的鲁样性,它本质上是一种开关控制,在系统中不可避免地带来“抖动”间题,如何消弱抖动又不失强鲁韩性,是目前需要研究的主要问题,近年来受到控制界十分重视的智能控制,由于它能摆脱对控制对象数学模型的依赖,已成为众所懈目的解决鲁样性间题的重要方法。下面就交流传动中常用的智能控制策
,对比分析他们的特点。
略进行梳理, 1模糊控制
模期控制是一种典型的智能控制方法,它不依赖被控对象的数学模型,可以克服非线性因索,对被调节对象的参数具有较
强的鲁棒性,
通常根据速度的误差信号和
误差信号的微分设计在线调整系数或者结
构的PID控制器,
制的原理。
调整的策略采用模糊控
还有学者把模糊控制器的输出
直接变为控制量
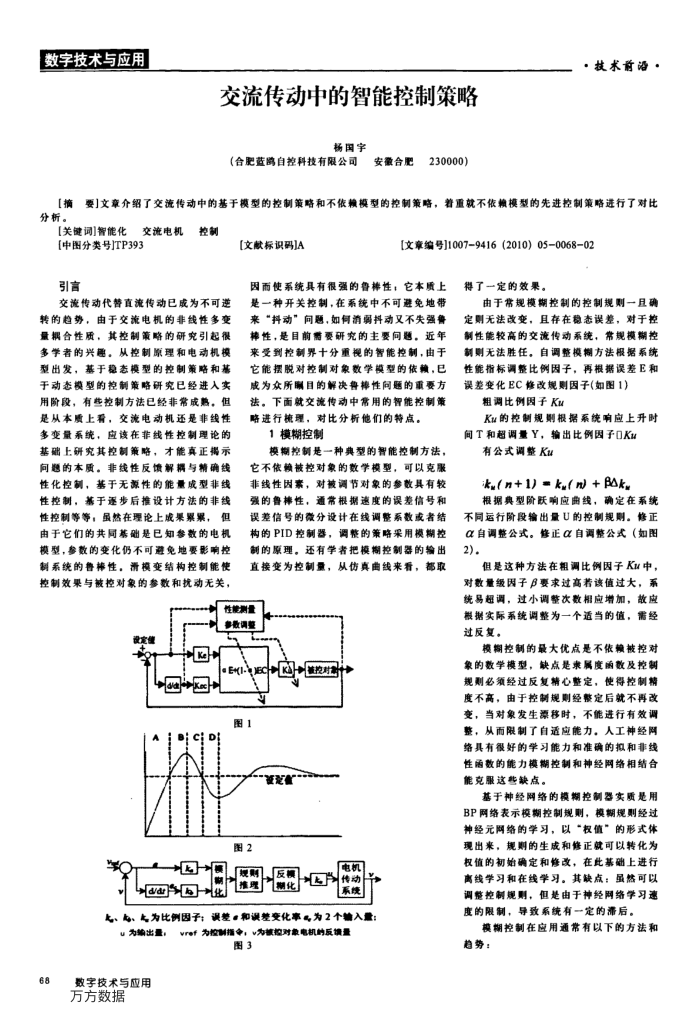
性能测量修数调整
设家
Keh
从仿真曲线来看,都取
EEC微控对
Xee
图1
经
图2
电机
规财推理
反塑化
传动
系续
七、、上为比例因子:误整。和误整变化率为2个链入量:
u为编出量,
68
数字技术与应用万方数据
vrof为控制指中,v为核控对象电机的反填量
图3
得了一定的效果。
由于常规模期控制的控制规则一且确定则无法改变,且存在稳态误差,对于控制性能较高的交流传动系统,常规模糊控制则无法胜任。自调整模糊方法根据系统性能指标调整比例因子,再根据误差E和误差变化EC修改规则因子(如图1)
粗调比例因子Ku
Ku的控制规则根据系统响应上升时间T和超调量Y,输出比例因子口Ku
有公式调整Ku
ku(n+1)=ku)+k
根据典型阶跃响应曲线,确定在系统不同运行阶段输出量U的控制规则。修正 α自调整公式。修正α自调整公式(如图 2)
但是这种方法在相调比例因子Kiu中,对数量级因子β要求过高着该值过大,系统易超调,过小调整数相应增加,故应根据实际系统调整为一个适当的值,需经过反复。
模糊控制的最大优点是不依赖被控对象的数学模型,缺点是求属度函数及控制规则必须经过反复精心整定,使得控制精度不高,由于控制规则经整定后就不再改变,当对象发生漂移时,不能进行有效调整,从而限制了自适应能力。人工神经网络具有很好的学习能力和准确的拟和非线性函数的能力模糊控制和神经网络相结合能克服这些缺点。
基于神经网络的模糊控制器实质是用 BP网络表示模期控制规则,模期规则经过神经元网络的学习,以“权值”的形式体现出来,规的生成和修正就可以转化为权值的初始确定和修改,在此基础上进行离线学习和在线学习。其缺点:虽然可以调整控制规则,但是由于神经网络学习速度的限制,导致系统有一定的滞后。
模棚控制在应用通常有以下的方法和趋势: