您当前的位置:首页>论文资料>激光枪自动打靶控制装置的设计
内容简介
 数事费本与度用
数事费本与度用激光枪自动打靶控制装置的设计
李龙静林狮狮黄辉泽楼然苗(浙江海洋学院浙江舟山316022)
数控技术
摘要:为了设计一种激光枪自动打靶控制装置,采用了飞思卡尔MC9S12XS128单片机作为主控制器,由激光头、摄像头、跑环靶、步进电机、能机、液晶显示器等主要模块组成的电路系。激光枪头方向由两个轴相五垂直的步造电机和能机进行上下及左右控制激光枪发射激光到购环靶,通过CMOS数字摄像头采集环靶激究点位置数据,通过单片机计算将光点位置在液晶显示屏上显示激光着弹点的环数、方位数据、跑环靶图形,并闪炼显示弹着点流光检自动打靶控制装置可以用键盘控制流光检的着弹点,能白动醋准并击中靶心,电可根据设定的环数,自动控制激光检瞻准击中购环靶上相应环位置
关键词激光枪自动打靶单片机控制
中图分类号:TP368.1
1靶环结构与方位计算方案
1.1弹着点检测
文献标识码:A
文章编号:1007-9416(2014)04-0009-02
67.5*22.5*22.5°67.5°112.5*157.5*时.tan(157.5*)=89.636 tan (112.5°)=89.491,tan(67.5*)=89.151,tan(22.5*)=87.455., tan( 22.5*)=87.455,tan(67.5*)=89.151,tan(112.5*)=89.491,tan
弹着点检测是以靶心为原点,在靶纸上建立一个虽拟的直角坐标系,通过摄像头拍摄激光点在靶纸上的坐标位置,经过计算,求出弹着点在靶纸上的环数和方位信息。
1.2角度计算
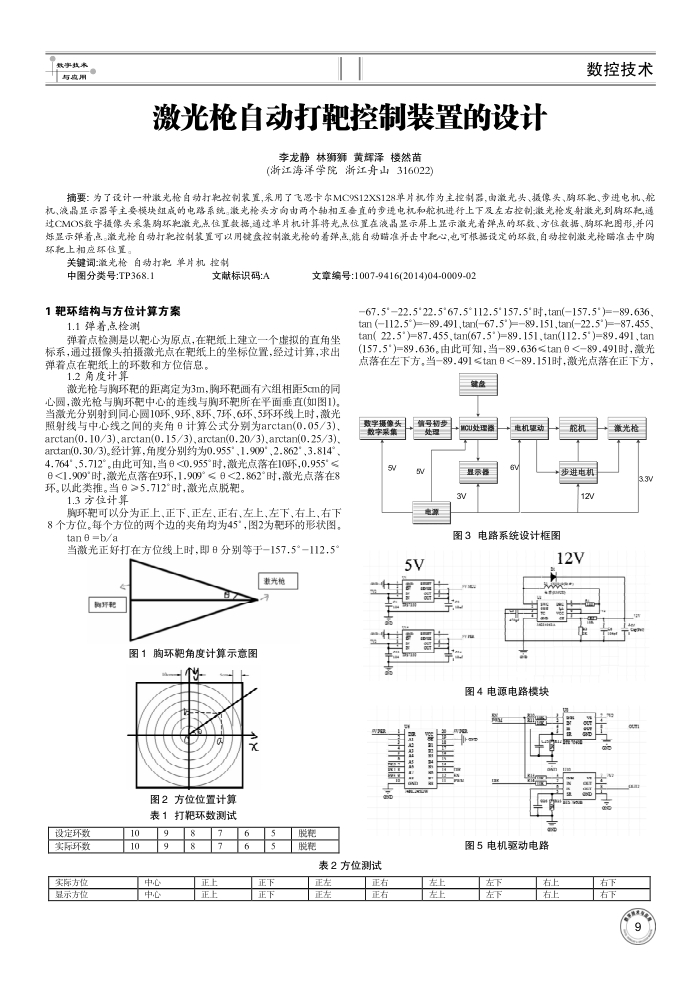
激光枪与胸环靶的距离定为3m,胸环靶画有六组相距5cm的同心圆,激光枪与胸环靶中心的连线与胸环靶所在平面垂直(如图1) 当激光分别射到同心圆10环、9环,8环,7环,6环,5环环线上时,激光照射线与中心线之间的夹角8计算公式分别为arctan(0.05/3)、 arctan(0.10/3),arctan(0.15/3),arctan(0.20/3),arctan(0.25/3), artan(0.30/3)。经计算,角度分别约为0.955",1.909°,2.862°3.814° 4.764",5.712°。由此可知,当<0.955°时,激光点落在10环,0.955* 6<1.909"时,激光点落在9环,1.909°≤6<2.862°时,激光点落在8 环。以此类推。当e≥5.712°时,激光点脱靶。
1.3方位计算
脚环靶可以分为正上,正下、正左、正右、左上,左下、右上、右下 8个方位。每个方位的两个边的夹角均为45",图2为靶环的形状图。
tan e =b/a
当激光正好打在方位线上时,即8分别等于-157.5°-112.5
欢光
开
图1胸环靶角度计算示意图
图2方位位置计算表1打靶环数测试
设定环数实际环数
实际方位显示方位
10 10
9
8
中心中心
正上正上
6
正下正下
脱靶脱耗
(157.5")=89.636,由此可知,当89.636≤tan<89.491时,激光点落在左下方,当-89.491≤tan8<-89.151时激光点落在正下方,
就盘
数字摄单头数字采集
5v
销号得步
+MCU处理器
5V
5V 翻
表2方位测试
正左正左
正右正右
电源
左上左上
显录器 3V
电机盟动
能机步进电机
12V
图3电路系统设计框图
12V
华
图4电源电路模块
国 i sa
图5电机驱动电路
左下左下
右上右上
激光枪
3.3V
右下右下