�������ߴ������ij������ܽ�ͨ������λ�����о�
���ݼ��
 �����ұ������
�����ұ������Ӧ���о�
�������ߴ������ij������ܽ�ͨ������λ�����о�
��
(�����Ƽ�ѧԺ��Ϣ����ѧԺ�����ϲ�330098)
ժҪ���ڳ������ܽ�ͨϵͳ��,��ʻ���䶨ס��Ϊ�˹ؼ�ͬ�⡣���ߴ���������Ϣ��ú����ݴ�����һ����ģʽ,��ڵ㶨λ����Ϊ������λ�ṩ��֧�š���������˻������ߴ������ij������ܽ�ͨ������λ����,����TDOA��ˮ����С���˷�����ʻ���½��г�ʼ��λ�����øĽ��������˲��㷨��߶�λ���ȵõ�����λ�á�ʵ��֤�����÷�������Ч����߶�ס������Ͷ��ɱ��͡�
�ؼ��ʣ����ߴ��������ж��ܽ�ͨ������ס
��ͼ�����:U495;TP212.9;TN929.5
���ױ�ʶ�룺A
���ſƼ�������ҵ�����ķ�չ������������Ѹ�����������н�ͨѹ������Ӵ������ܽ�ͨϵͳ(ITS)�еij�����λ������ʶ���ܹ�ע���˶��еij�����λΪITS�еĹؼ����⡣���ߴ�����(WSN)���ɴ����������ݴ�����ͨ�ŵ�Ԫ��Ͻڵ�������������ʽ���ɵ����磬��һ�ֲ��������Ľڵ��ȫ�ֲ�ϵͳ
��Ի���WSN��ITSϵͳ�����������ͨ��TDOA������ó���ԭʼλ����Ϣ��������С���˷��������ݡ����ζ�λ��ó���λ�ô�����Ϣ�������øĽ��������˲��㷨�����ٴζ�λ��ʵ��֤����
��������ķ����ɱ��ϵͣ���ó�λ����λ����Ϣ���Ƚϸߡ� 1���ܽ�ͨϵͳģ��
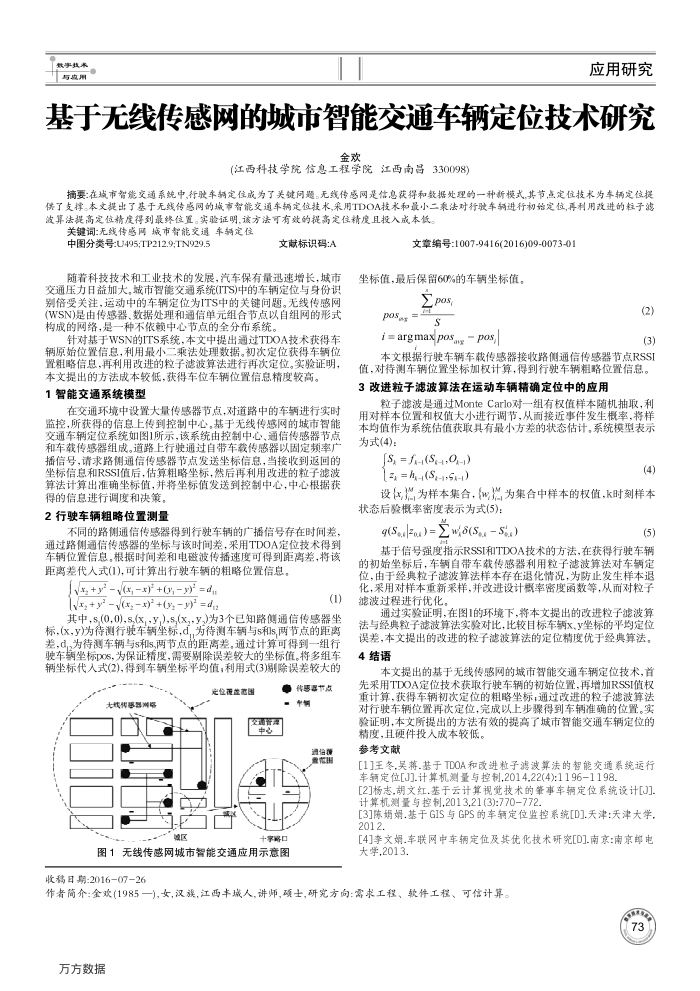
�ڽ�ͨ���������ô����������ڵ㣬�Ե�·�еij�������ʵʱ��أ�����õ���Ϣ�ϴ����������ġ��������ߴ������ij������ܽ�ͨ������λϵͳ��ͼ1��ʾ����ϵͳ�ɿ�������ͨ�Ŵ������ڵ�ͳ��ش�������ɡ���·����ʻͨ���Դ����ش������Թ̶�Ƶ�ʹ㲥�źţ�����·��ͨ�Ŵ������ڵ㷢��������Ϣ�������յ����ص�������Ϣ��RSSIֵ����������꣬Ȼ�������øĽ��������˲��㷨�����ȷ����ֵ����������ֵ���͵��������ģ����ĸ��ݻ�
�õ���Ϣ���е��Ⱥ;��ߡ� 2��ʻ��������λ�ò���
��ͬ��·��ͨ�Ŵ������õ���ʻ�����Ĺ㲥�źŴ���ʱ���ͨ��·��ͨ�Ŵ��������������ʱ�Ų����TDOA��λ�����õ�����λ����Ϣ������ʱ���͵�Ų������ٶȿɵõ��������þ�������ʽ(1)���ɼ������ʻ�����Ĵ���λ����Ϣ��
x, + y2 y(x, x)* +(y, y)* = d,[/* + y* /(x x)* +(+ y)* =d,
(1)
���У�s,(0.0),s,(x,,y,),5,(x,,y)Ϊ3����֪·��ͨ�Ŵ��������꣬(x��y)Ϊ������ʻ�������꣬d.Ϊ�������s��s,���ڵ�ľ���d,,Ϊ�������s��s,���ڵ�ľ����ͨ������ɵõ�һ����ʻ��������pxs��Ϊ��֤���ȣ���Ҫ������ϴ������ֵ�������鳵���������ʽ(2)���õ���������ƽ��ֵ������ʽ(3)������ϴ��
��λҽ�淶Χ
�����������
�´�����ڵ�.����
��ͨ��������
ͨ��o ��
��
ʮ��·��
ͼ1���ߴ������������ܽ�ͨӦ��ʾ��ͼ
�������ڣ�2016-0726
���±��:1007-9416(2016)09-0073-01
����ֵ�������60%�ij�������ֵ
(2)
posax=
S
i = argmax pos. pos,
(3)
���ĸ�����ʻ�������ش���������·��ͨ�Ŵ������ڵ�RSSI ֵ���Դ����λ�������Ȩ���㣬�õ���ʻ��������λ����Ϣ�� 3�Ľ������˲��㷨���˶�������ȷ��λ�е�Ӧ��
�����˲���ͨ��MonteCarlo��һ����Ȩֵ���������ȡ�����ö�����λ�ú�Ȩֵ��С���е��ڣ�����ӽ��¼��������ʣ���������ֵ��Ϊϵͳ��ֵ��ȡ������С�����״̬���ƣ�ϵͳģ�ͱ�ʾΪʽ(4)��
[S, = f-I(S,-,O.-)[=+ = h-(S-Sx-)
(4)
��("Ϊ�������ϣ���Ϊ������������Ȩֵ��kʱ������״̬��������ܶȱ�ʾΪʽ(5)��
q(S..2ae) Zw8(So. St.e)
(5)
�����ź�ǿ��ָʾRSSI��TDOA�����ķ������ڻ����ʻ�����ij�ʼ��������Դ����ش��������������˲��㷨�Գ�����λ�����ھ��������˲��㷨���������˻������Ϊ��ֹ���������˻������ö��������²��������Ľ�������ܶȺ����ȣ��Ӷ��������˲����̽����Ż�
ͨ��ʵ��֤������ͼ1�Ļ����£�����������ĸĽ������˲��㷨�뾭�������˲��㷨ʵ��Աȣ��Ƚ�Ŀ�공��x��y�����ƽ����λ����������ĸĽ��������˲��㷨�Ķ�λ�������ھ����㷨�� 4����
��������Ļ������ߴ������ij������ܽ�ͨ������λ���������Ȳ���TDOA��λ������ȡ��ʻ�����ij�ʼλ��������RSSIֵȨ�ؼ��㣬��ó������ζ�λ�Ĵ������꣬ͨ���Ľ��������˲��㷨����ʻ����λ���ٴζ�λ��������ϲ���õ�����ȷ��λ�á�ʵ��֤��������������ķ�����Ч������˳������ܽ�ͨ������λ��
���ȣ���Ӳ��Ͷ�˳ɱ��ϵ͡��ο�����
[1]����,���.����TDOA�Ľ������˲��㷨�����ܽ�ͨϵͳ���г�����λ[J7��������������.2014.22(4);1196-1198
[2]��־.���ĺ�.�����Ƽ����Ӿ����������³�����λϵͳ���[J]. ��������������,2013,21(3):770-772.
[3]�¾��.����GIS��GPS�ij�����λ���ϵͳ[D].�������ѧ�� 2012.
[4]���ľ�.�������г�����λ�����Ż������о�[D].�Ͼ����Ͼ��ʵ��ѧ.2013.
����飺��(1985һ)��Ů�����죬��������ˣ���ʦ��ȷʿ���о��������̡��������̡����ż��㡣��������