自动化控制在莱钢型钢炼钢厂4 LF精炼炉中的应用
内容简介
 作用,当控制使能端为高电平,输人电平为一高一低,电机正或反转。输人电平同为低电平电机停止,同为高电平电机利停。
作用,当控制使能端为高电平,输人电平为一高一低,电机正或反转。输人电平同为低电平电机停止,同为高电平电机利停。2.2.2电机电流过氧保护
当电动推杆发生故障,电机电流过大时,L298N15脚连接的电流采样电阻R13上通过的电流增加,采样电阻上的电压升高,三极管Q4导通,使L298N11脚的控制使能端为低电平,电机停止。电容C4吸收电机启动时的过流电压波形,从而使电机正常启动。
2.3操作状态指示电露
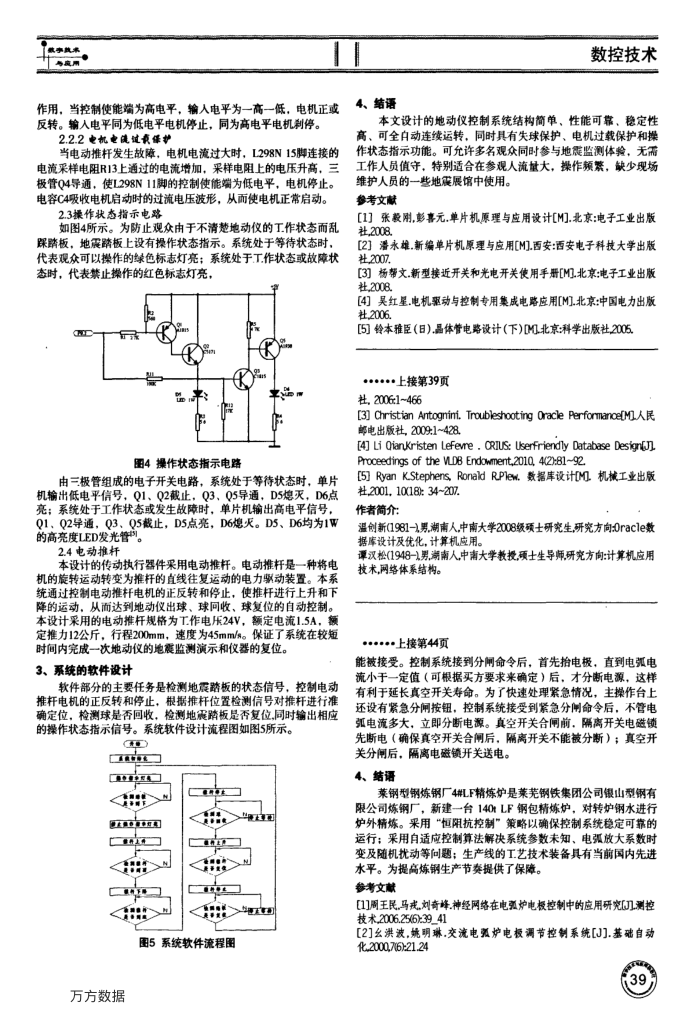
如图4所示。为防止观众由于不清楚地动仪的工作状态而乱踩踏板,地震踏板上设有操作状态指示。系统处于等待状态时,代表观众可以操作的绿色标志灯亮;系统处于工作状态或故障状态时,代表禁止操作的红色标志灯亮,
图4操作状态指示电路
由三极管组成的电子开关电路,系统处于等待状态时,单片机输出低电平信号,Q1、Q2截止,Q3、Q5导通,D5熄灭,D6点亮;系统处于工作状态或发生故障时,单片机输出高电平信号, Q1、Q2导通,Q3、Q5截止,D5点亮,D6熄灭。D5、D6均为1W 的高亮度LED发光管。
2.4电动推杆
本设计的传动执行器件采用电动推杆。电动推杆是一种将电机的旋转运动转变为推杆的直线往复运动的电力驱动装置。本系统通过控制电动推杆电机的正反转和停止,使推杆进行上升和下降的运动,从而达到地动仪出球、球同收、球复位的自动控制。本设计采用的电动推杆规格为T作电压24V,额定电流1.5A,额定推力12公斤,行程200mm,速度为45mm/s。保证了系统在较短
时间内完成一次地动仪的地震监测演示和仪器的复位。 3、系统的软件设计
软件部分的主要任务是检测地震踏板的状态信号,控制电动推杆电机的正反转和停止,根据推杆位置检测信号对推杆进行准确定位,检测球是否回收,检测地震踏板是否复位,同时输出相应的操作状态指示信号。系统软件设计流程图如图5所示。
L a
图5系统软件流程图
万方数据
4、结语
数控技术
本文设计的地动仪控制系统结构简单、性能可靠、移定性高、可全白动连续运转,同时具有失球保护、电机过载保护和操作状态指示功能。可允许多名观众同时参与地震监测体验,无需工作人员值守,特别适合在参观人流量大,操作频繁,缺少现场
维护人员的一些地震展馆中使用。参考文献
[1]张款,彭喜元.单片机原理与应用设计[M].北京:电子工业出版社,2008.
[2]潜永雄.新编单片机原理与应用[M].西安:西安电子科技大学出版社,2007.
[3]杨帮文.新型接近开关和光电开关使用手册[MI-北京:电子工业出版社,2008
[4]】吴红星.电机驱动与控制专用集成电路应用[M].北京:中国电力出版社,2006
[5]铃本雅臣(日).晶体管电路设计(下)[MI北京:科学出版社,2005
..上接第39页社,2006:1~466
[3] Christian Antognini. Troubleshooting Oracle Performance[ML人民邮电出版社,2009:1~428.
[4] Li QianKristen LeFevre . CRIUS: Userfriendly Database Design;J] Proceedings of the WLDB Endowment,2010, 4(2):81~92
[5]】RyanK.Stephens,RonaldRPlew.数据库设计[M.机械工业出版
社,2001,101834~207. 作者简介:
温创新(1981-}男,湖南人,中南大学2008级硕士研究生研究方向:0racle数据库设计及优化,计算机应用。
谭汉松(1948-)男,湖南人中南大学教投,硕士生导师研究方向:计算机应用
技术,网络体系结构。.上接第44页
能被接受。控制系统接到分闸命令后,首先抬电极,直到电弧电流小于一定值(可根据买方要求来确定)后,才分断电源,这样有利于延长真空开关寿命。为了快速处理紧急情况,主操作台上还设有紧急分闸按钮,控制系统接受到紧急分闸命令后,不管电弧电流多大,立即分断电源。真空开关合闸前,隔离开关电磁锁先断电(确保真空开关合闸后,隔离开关不能被分断):真空开
关分闸后,隔离电磁锁开关送电。 4、结语
莱钢型钢炼钢厂4#LF精炼炉是莱芜钢铁集团公司银山型钢有限公司炼钢厂,新建一台140tLF钢包精炼炉,对转炉钢水进行炉外精炼。采用“恒阻抗控制”策略以确保控制系统稳定可靠的运行:采用自适应控制算法解决系统参数未知、电弧放大系数时变及随机扰动等向问题;生产线的工艺技术装备具有当前国内先进
水平。为提高炼钢生产节奏提供了保障。参考文献
[1]周王民,马戎.刘奇峰.神经网络在电弧炉电极控制中的应用研究[刀]测控技术,2006.25(6):39_41
[2]么洪波,姚明琳.交流电双炉电板调节控制系统[J].基础自动化2000,7(6);21.24
39