您当前的位置:首页>论文资料>农用型外骨骼机器人起蹲过程稳定性控制研究
内容简介
 第7期 2016年7月
第7期 2016年7月组合机床与自动化加工技术
Modular Machine Tool & Automatic Manufacturing Technique
文章编号:1001=2265(2016)070067-03
DO1;10.13462/j. cnki.mmtamt.2016.07.019
No.7 Jul.2016
农用型外骨骼机器人起奠过程稳定性控制研究
季峰,樊军,刘梦霞
(新疆大学机械工程学院,乌鲁木齐830047)
摘要:外骨骼机器人起难运动的稳定问题,即实现机器人在起遵运动中始终保持平稳。文章将从起遵过程的轨速优化与控制的角度出发,并结合人类的特点,提出一种外骨骼机器人误差修正的方法。利用ZMP和COM(质心)间的数学关系,计算实际的零点力矩,求得质心和零力矩点的偏差值,再根据差值对起跌轨迹进行优化和控制,修正偏差,来实现外骨骼机器人起遵运动平稳运行。最后使用
Matlab仿真模拟,验证了起遵过程规划与稳定性控制方法的有效性。关键词:起跨;误差;修正
中图分类号:TH166;TC65
文献标识码:A
AgriculturalType ExoskeletonRobot SquattingProcess Stability Control Research
JIFeng,FAN Jun,LIUMeng-xia
(Mechanical Engineering Academy, Xinjiang University, Urumqi 830047, China)
Abstract: Exoskeleton robot up squatting movement stability problem, namely the implementation in the squat movement of the robot is always stable. This article from the squat down the perspective of trajectory optimization and control of the process, and combines the characteristic of human beings, an exoskeleton ro-bot error correction method is put forward. Using ZMP and COM (center of mass), the mathematical rela-tionship between the actual zero moment, and get the deviation in the center of mass and zero moment point, again according to the difference of the squat trajectory optimization and control, fixed deviation, to implement the exoskeleton robot squat movement running smoothly. The last use of Matlab simulation, to
verify the squat process planning and the effectiveness of the stability control method Key words: crouch up; error; correction
0引言
外骨骼机器人是一种可以有效地识别人的意图,协调人体动作,继而增强人的运动能力的可穿戴的机械装置(13)
国内外有很多专家学者已经在这方面取得了进展。如Hanzou"机器人是第一个能实现自起立的类人机器人;日本HRP项目开发的HRP-2P型类人机器人,是一个能从俯卧和仰卧的情况下实现起立过程且尺寸与人体相仿的类人机器人[46]等。国内也有很多高校在从事该方面的研究,但是相对国外还是有很大差距。
为了能让外骨骼机器人在作业过程中,更好的协调人完成动作,提高效率,就需要保证其在操作过程中的稳定性。而田间作业经常处于会半姿态,所以对起爵过程的稳定性进行研究非常重要。
外骨骼机器人模型
1
外骨骼机器人如果需要完成平地行走、起尊等动作,则机器人需要实现在侧向、前向、转动三个方向上都能自由运动。对外骨骼机器人起跨过程进行分析时,可收稿日期:2015-12-07
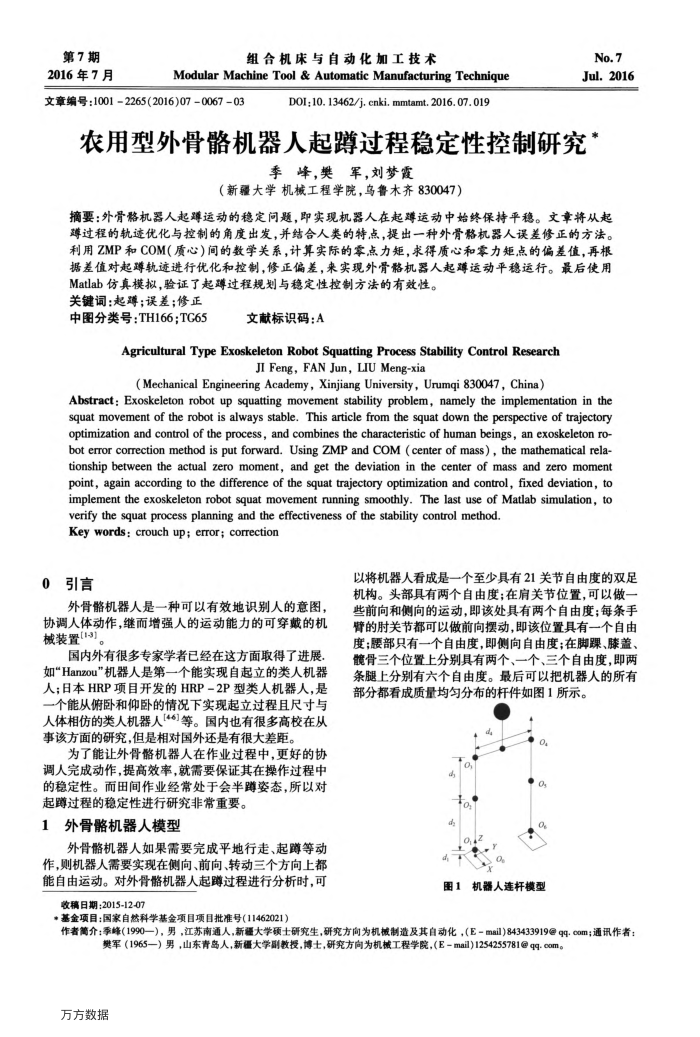
以将机器人看成是一个至少具有21关节自由度的双足机构。头部具有两个自由度:在肩关节位置,可以做一些前向和侧向的运动,即该处具有两个自由度:每条手臂的肘关节都可以做前向摆动,即该位置具有一个自由度:腰部只有一个自由度,即侧向自由度:在脚踝、藤盖,髋骨三个位置上分别具有两个、一个、三个自由度,即两条腿上分别有六个自由度。最后可以把机器人的所有部分都看成质量均匀分布的杆件如图1所示。
d
图1机器人连杆模型
*基金项目:国家自然科学基金项目项目批准号(11462021)
作者简介:季峰(1990―),男,江苏南通人,新强大学硕士研究生,研究方向为机械制造及其自动化,(E-mail)843433919@qq.com;通讯作者:
樊军(1965―)男,山东青岛人,新疆大学副教授,博士,研究方向为机械工程学院,(E-mail)1254255781qq-com。
万方数据