修正型果蝇算法优化GRNN的大梁自动焊障碍预测
内容简介
 第38卷第1期 2017年1月
第38卷第1期 2017年1月焊接学报
TRANSACTIONS OF THE CHINA WELDING INSTITUTION
Vol.38No.1
y2017
January
修正型果蝇算法优化GRNN的大梁自动焊障碍预测
洪波,刘龙,王涛
(湘潭大学焊接机器人及应用湖南省重点实验室,湘潭411105)
摘要:大梁自动焊时,必须自动避开工件上的筋板、隔板和空洞等障碍物,但因产品的种类多,工件上障碍物的位置存在随机性,难以通过单一的方法进行障碍物预测。针对该问题,利用超声波传感器采集障碍物信息,提出一种修正型果蝇算法优化广义回归神经网络(AFOA-CRNN)的大梁自动焊障碍物预测模型.该方法在传统果蝇算法中引入信息素和灵敏度两个因子,改进了寻优策略和果蝇位置的替换方式,对GRNN进行参数优化,进行大梁自动焊障碍物的预测.结果表明,建立的修正型AFOA-CGRNN预测模型相比于FOA-GRNN,训练速度更快,预测精度更高
关键词:大梁自动焊;障碍物预测;果蝇优化算法;广义回归神经网络
中图分类号:TG409 0序言
文献标识码:A
文章编号:0253360X(2017)01007304
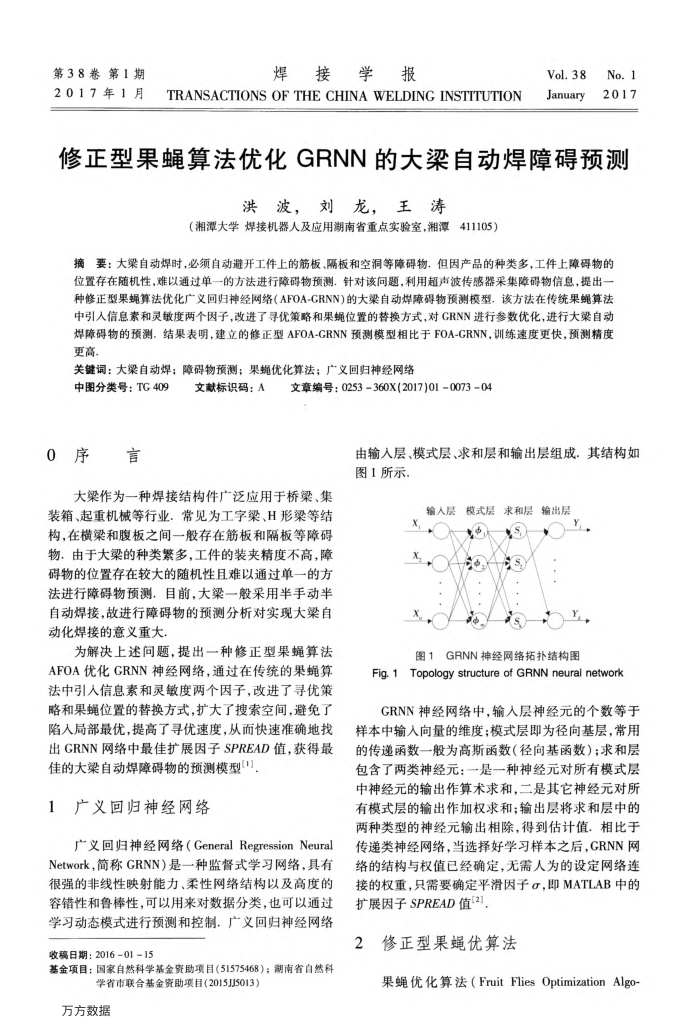
由输人层、模式层、求和层和输出层组成.其结构如图1所示
大梁作为一种焊接结构件广泛应用于桥梁、集
装箱、起重机械等行业.常见为工字梁、H形梁等结构,在横梁和腹板之间一般存在筋板和隔板等障碍物,由于大梁的种类繁多,工件的装夹精度不高,障碍物的位置存在较大的随机性且难以通过单一的方法进行障碍物预测.目前,大梁一般采用半手动半自动焊接,故进行障碍物的预测分析对实现大梁自动化焊接的意义重大.
为解决上述问题,提出一种修正型果蝇算法 AFOA优化GRNN神经网络,通过在传统的果蝇算法中引人信息素和灵敏度两个因子,改进了寻优策略和果蝇位置的替换方式,扩大了搜索空间,避免了陷入局部最优,提高了寻优速度,从而快速准确地找出GRNN网络中最佳扩展因子SPREAD值,获得最
佳的大梁自动焊障碍物的预测模型(") 1广义回归神经网络
广义回归神经网络(GeneralRegressionNeura) Network,简称GRNN)是一种监督式学习网络,具有很强的非线性映射能力、柔性网络结构以及高度的容错性和鲁棒性,可以用来对数据分类,也可以通过学习动态模式进行预测和控制.广义回归神经网络
收稿日期:2016-01-15
基金项目:国家自然科学基金资助项目(51575468);湖南省自然科
学省市联合基金资助项目(2015JJ5013)
万方数据
输人层模式层求和层输出层 XO
OY
@
X
s,
S
GRNN神经网络拓扑结构图
图1
Fig. 1Topology structure of GRNN neural network GRNN神经网络中,输入层神经元的个数等于
样本中输人向量的维度:模式层即为径向基层常用的传递函数一般为高斯函数(径向基函数):求和层包含了两类神经元:一是一种神经元对所有模式层中神经元的输出作算术求和,二是其它神经元对所有模式层的输出作加权求和;输出层将求和层中的两种类型的神经元输出相除,得到估计值.相比于传递类神经网络,当选择好学习样本之后,GRNN网络的结构与权值已经确定,无需人为的设定网络连接的权重,只需要确定平滑因子α,即MATLAB中的扩展因子SPREAD值[2]
2修正型果蝇优算法
果蝇优化算法(FruitFliesOptimizationAlgo